.jpg)
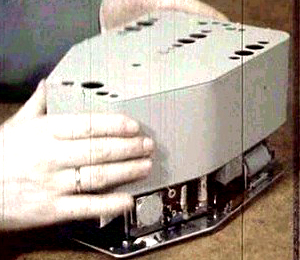
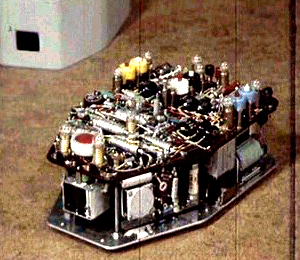

The above three images suggest there is a film clip out there somewhere.
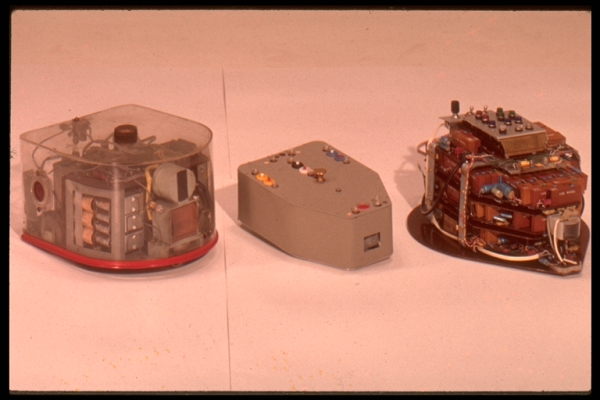
The Vienna Tortoises: Left: 1954 Eichler's Schildkröte; Centre: 1959 Kretz/Angyan/Zemanek Machina Combinatrix; Right: 1965 Bielowski Schildkröte
HANS KRETZ: An Interview Conducted by David Morton, IEEE History Center, 25 July 1996
Interview #283 for the IEEE History Center, The Institute of Electrical and Electronics Engineers, Inc.
Copyright Statement
This manuscript is being made available for research purposes only. All literary rights in the manuscript, including the right to publish, are reserved to the IEEE History Center. No part of the manuscript may be quoted for publication without the written permission of the Director of IEEE History Center.
Request for permission to quote for publication should be addressed to the IEEE History Center Oral History Program, 39 Union Street, New Brunswick, NJ 08901-8538 USA. It should include identification of the specific passages to be quoted, anticipated use of the passages, and identification of the user.
It is recommended that this oral history be cited as follows:
Hans Kretz, an oral history conducted in 1996 by David Morton, IEEE History Center, New Brunswick, NJ, USA.
Interview
INTERVIEW: Hans Kretz
INTERVIEWER: David Morton
PLACE: Vienna, Austria
DATE: July 25, 1996
Education and Cybernetics
Kretz:
I was born 1930, in Linz, in Upper Austria. After primary school and high school in Vienna I went to study telecommunication and electronics. In German we said "technique of low currents," a rather old-fashioned expression. I studied at the Technical University in Vienna, and graduated in 1960 as Diploma Engineer. My thesis was on a Cybernetic subject called the "artificial turtle." It was a model of neuropsychological functions. This is the more scientific description. I was engaged about two years to talk with a neuropsychological physician from Hungary. He told me what more or less simple animals are doing if certain stimuli are applied. And I made a block scheme out of his different remarks and descriptions. And afterwards I made the technical realization in the form of a small battery operated self-running model. It operated on different preconditions. I "taught" the model to build up so-called conditioned reflexes, as Pavlov's dog has done. From time to time it would "forget" something it had learned in previous periods and it could be shocked by strong stimulus, and so on. Afterwards I built two models. One for the young Hungarian who immigrated 1960 to the States and demonstrated his model at MIT, for instance. And people were very impressed but said the model was too small.
Morton:
What was his name?
Kretz:
Andrew Angyan. Later on, he was a physician in Los Angeles. Now I made another model for my university, the Technical University of Vienna. This model later on came to the Technical Museum of Vienna where my model can be seen together with a picture and a short description of myself. In this technical museum you can also see another cybernetics thesis, e.g. a model of a "mouse in a maze" after the principle developed by the Greek myth of Ariadne's thread, and also the famous "Mailuefterl." It's the first fully transistorized mainframe computer in Europe. Made at the technical university under the chief management of Professor Heinz Zemanek, a pioneer not only in Austria but at least in Europe of cybernetics and as well in computer questions. One of the most experienced in that respect. I myself was half a year afterwards a scientific assistant in this scope at the university. I had lectures in London at the Royal Academy and in Karlsruhe at the Nachrichtentechnische Gesellschaft. And later on there were several publications on this specialty. On the other hand my job meant to handle most modern topics.
——–end excerpt—-
[7] Kretz, H. 1961. "Vollständige Modelldarstellung des bedingten Reflexes" [Complete model of the conditioned reflex]. InLernende Automaten, NTG Fachtagung, Karlsruhe 1961, Munich, R. Oldenbourg, pp. 52-62.
[8] Kretz, H., A. J. Angyan and H. Zemanek. 1961. "A Model for Neurophysiological Functions,"Fourth London Symposium on Information Theory, London, Butterworth, pp. 270-284.
[9] Kretz, H. 1962. "Kybernetik-Brücke zwischen den Wissenschaften" [Cybernetics–bridge between the sciences] and "Modelldarstellung biologischer Verhaltensweisen" [Models of biological behavior].Umschau, pp. 193-195 and 240-242.
Beyond art: a third culture : a comparative study in cultures, art …, Issue 72 By Peter Weibel, Ludwig Múzeum (Budapest, Hungary
Heinz Zemanek p327
6. Cybernetics
Electronics began flirting with biology early on in the 1930s, and there were even forerunners in the nineteenth century. Actually, electricity began with biology and Galvani in the 1930s, its main purpose was telecommunication, and its goal was to learn from biology. The 1950s became the golden age of cooperation. and there is a familiar key word for it, cybernetics. Again, I may and must begin with myself, because I am the only one on earth who has built and further developed all three basic models with my students. They are the Artificial Tortoise. the Mouse in the Maze, and the Homeostat.
The artificial tortoise looks only slightly like a tortoise and was not intended to imitate one. Rather, it is a model for the conditioned reflex the Russian physiologist I. P. Pavlov developed the algorithms for it around 1890 When a dog sees food, the production of saliva in his mouth increases. This is an unconditioned reflex if a bell is rung at the same time (Pavlov used an electric door buzzer), the animal learns that the bell promises food, saliva production increases when the bell rings, even if no food Is visible. This is a conditioned reflex that disappears when the hope for food is not fulfilled often enough. Pavlov described the phenomenon, not as a formula but in prose. British neurologist W.G Walter recognized that this model Could be made electronically and built a little covered vehicle (hence the name tortoise), containing a lamp and whistle. Symbolizing food and sound respectively if the vehicle has an obstacle, the cover closes a contact; the model rolls back and tries again, adjusting a little more to the right or left. This creates the impression of animal behavior. The first Vienna model was a copy of Walter's model and represented Austria at the first cybernetics congress in Namur in 1956.
My medical partner for the next step was Hungarian neurologist and psychologist A.J. Angyan. He traveled with a more complex model of Walter's tortoise to a conference in London, the Mechanization of Thought Processes, in 1958 and stopped at our institute in Vienna in order to improve his somewhat poor model (at that time, cybernetics in the communist countries was still a bourgeois, decadent quasi-science, and Angyan could not obtain proper components). On his return trip, he decided in Vienna not to return to Hungary. but to apply for an American visa. During the waiting period, which lasted longer than expected (a good opportunity for us!), he not only cooperated with us as a team member in developing an expanded model for two connected conditioned reflexes but also obtained a grant from the Rockland State Hospital in New York City, which permitted him to live in Vienna and contribute a little to the costs — in return, the Hospital received one of the two models built. The student assistant was Hans Kretz. Altogether, we built more than five models of the tortoise in Vienna.
Angyan, A.J.; Kretz Hans; Zemanek, Heinz: A Model for Neurophysiological Functions. In: Fourth London Symposium on Information Theory, 1960, hrsg. von Colin Cherry. London 1961. S. 270 – 284 (ZA 112) -pdf here A Model for Neurophysiological Functions. 1960 za112
Excerpts of pdf:
Brief technical description
While the logical description is based on dynamic techniques (time is strictly quantized and the variables and functions are sequences of values 0 or I for each moment), the model has been designed using a static technique: relay
contacts and potentials are maintained for the time between activation and disactivation (time quantization is not strictly necessary and series of ones are replaced by blocks of direct current.
The receptors—A microphone controls two selective feedback amplifiers for N2 and N1 and one biased amplifier for N3. The decision between 0 and I depends on thresholds circuits in the amplifiers.
A phototransistor with 'a cylindric lens controls a multistage D.C. amplifier which discriminates strong (S3) and weak (S1) light and which includes the differentiating circuits Do and D1.
Instead of Walter's moving shell this model has a relay circuit for checking the motor current. When an obstacle is encountered, the motor current increases and the relay operates, i.e. T 1.
282
Information processing circuits—The logical functions make use of relay contacts and diode circuits. Delays are produced by thermistors or by RC networks; storing is by self-locking relays.
The counters are networks of contacts and capacitors controlling bi-stable relays with neon lamps.
The effectors—These actually consist of two motors controlled in a way that produces the desired movements E6 through E0. A special effect is the goal-seeking mechanism which is controlled by the single phototransistor: every time a beam of light reaches the phototransistor there will be a slightly delayed change-over from one motor to the other resulting in a serpentine movement.
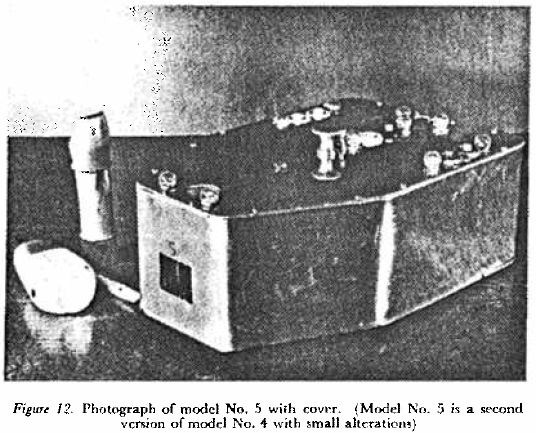
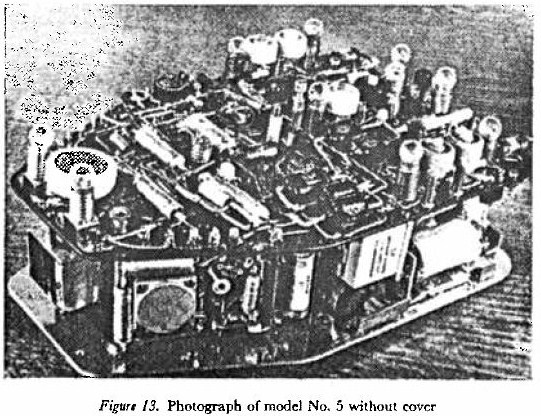
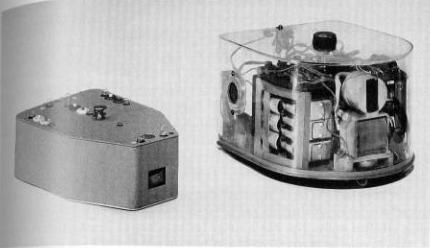
Technical data: differences between models 4 and 5—There is no basic difference between the two models 4 and 5. Both are compact automata running on two wheels (each wheel driven by a separate motor) and one ball-type castor. A 6 volt Ni-Cd-battery powers the entire equipment of two motors, 19 relays, 14 transistors and 8 pilot lamps. A D.C.-converter supplies 270 volt for the counting units. 6 push-buttons also permit manual establishment of various states.
Model 5 used the experience gained in constructing model 4 and has somewhat smaller dimensions (10 in. by 7 in. by 4 in.) and lower weight (about 5 lb.).
PROGRAMMING OF BIOLOGICAL MODELS
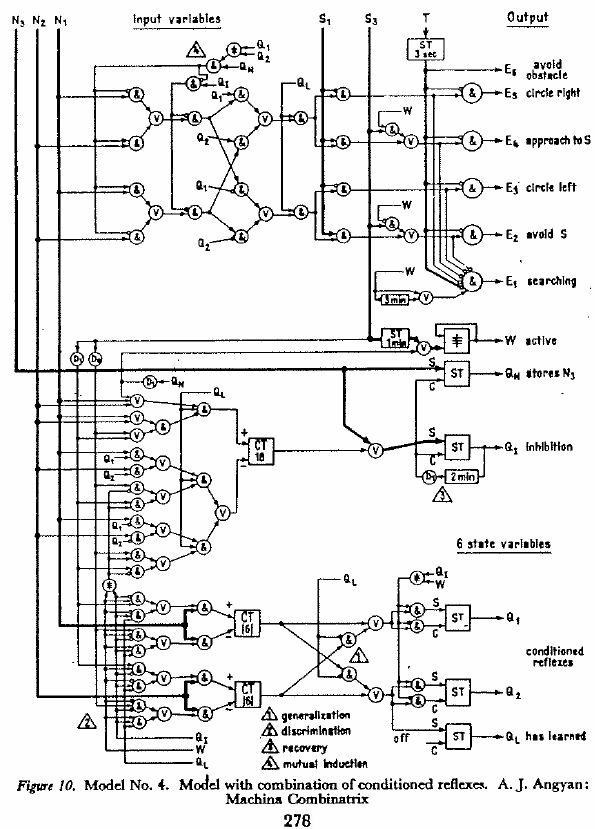
Figure 10 makes it clear that both technical design and logical examination of such intricate models is an involved job. In particular, development and functional improvements on the model can be made only by engineering experts who, in addition, understand the biological language.
A much better, more straight-forward, more flexible and less expensive answer to the problem of biological models would be programming on a computer. This, however, is subject to two pre-requisites. First, biologists must be able to express the functional structures to be simulated by a model in terms of logical algebra; secondly, an algorithmic language for' logical algebra and the associated formula translator must be developed. In 1960, the Viennese team working with the computer MAILUFTERL began investigations on the processing of logical data by this computer; consideration is at present given to the development of a suitable algorithmic language. Efforts are being devoted to programming the structure of Figure 10.
The authors wish to give acknowledgement to the Rockland State Hospital for financing model No. 4 and to Siemens & Halske, Werntrwerk Munchen, for supplying most of the relays. They are indebted to the MAILUFTERL team for helpful discussion as to logical programming and to H. Resele for help in translation work.
One Reply to “1959 – Machina Combinatrix – Kretz / Angyan / Zemanek (Austrian)”
Comments are closed.