


Penn State Research Team Develops OctArm Soft Robot Manipulator
Recent interest in expanding the capabilities of robot manipulators has led to significant research in continuum manipulators. The idea behind these robots is to replace the serial chain of rigid links in conventional manipulators with smooth, continuous, and flexible links. Unlike traditional rigid-linked robots, continuum robot manipulators can conform to their surroundings, navigate through unstructured environments, and grasp objects using whole arm manipulation. Soft continuum manipulators can be designed with a large number of actuators to provide hyper-redundant operation that enables dexterous movement and manipulation with robust performance. This improved functionality leads to many applications in industrial, space, and defense robotics.
Previous continuum robots used cable-tendon and pressurized tube actuators with limited performance. Cable-tendons must be tensioned or the cables become snarled or fall off drive pulleys, limiting the robot speed. Pneumatic bellows have low shear stiffness, limiting load capacity. Thus, there exists a need for a highly dexterous, fast, and strong soft robot manipulators.
Dr. Christopher Rahn, Professor of Mechanical Engineering at Penn State along with his students Dustin Dienno and Mike Pritts, and assisted by Dr. Michael Grissom developed the OctArm manipulator using air muscle actuators. These actuators are constructed by covering latex tubing with a double helical weave, plastic mesh sheath to provide the large strength to weight ratio and strain required for soft robot manipulators.
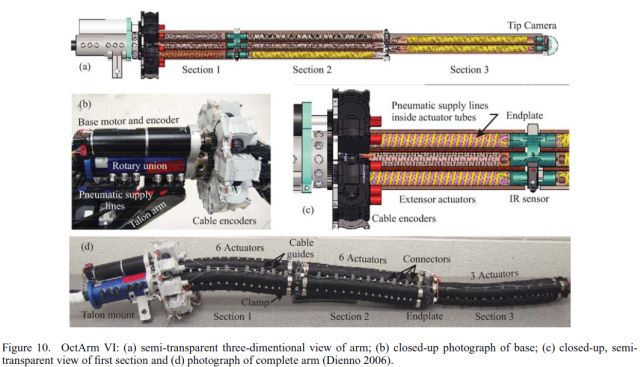
OctArm is divided into three sections. Each section is capable of two axis bending and extension which allows nine degrees of freedom. The manipulators are actuated with pressurized air (Maximum pressure = 120 psi) pressure control valves and polyurethane connective tubing.
The air muscle actuators are optimized to provide the desired wrap angles and workspace. The distal section of each OctArm is designed to have a minimum wrap diameter of 10 cm. The length of each section is chosen so that the manipulator can provide a range of 360 degrees wrap angles to accommodate a wide range of objects sizes. To provide the desired dexterity, OctArm is constructed with high strain extensor actuators extend up to 80%.
To provide two-axis bending and extension, three control channels are used. selected. Six actuators are used in sections one and two and three actuators are used in section three. The six sections have two actuators for each control channel and results in actuators located at a larger radius, corresponding to higher stiffness and load capacity. Secondary layers of mesh sleeving are used to group individual actuators in control channels. Three closely-spaced actuators provide high curvature
for the distal sections. The third, visible, mesh layer or fabric skin is designed to
protect the manipulator from abrasion and wear.
For the field tests, OctArm was mounted to the second link of a Foster-Miller TALON platform. The control valves and two air tanks provided nine channels of controlled pneumatic pressure. Clemson University provided the control electronics and operation interface for these tests. The OctArm /Talon system underwent extensive field trials in the spring of 2005 at the Southwest Research Institute (SwRI) in San Antonio, Texas.
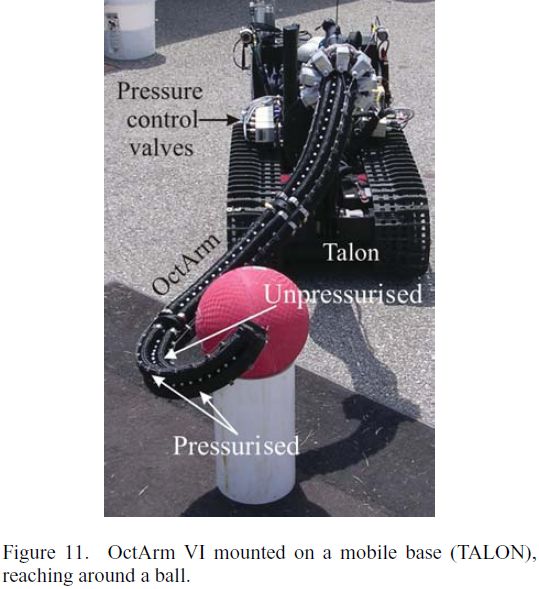
Initial tasks included stacking and unstacking traffic cones. The ability of the system to grasp objects such as spheres and cylinders over a wide range of scales was recorded. The system was also operated in water. The OctArm was submerged in water, while attempting to grasp various payloads and to maintain grasps under turbulent flow. The system was also operated in rubble piles. The trials described demonstrate that OctArm continuum robots are a feasible and attractive alternative to conventional robot manipulators in unstructured environments, and also that there is room for improvement.
To further test the robot in real-world conditions, Dr. Rahn and his post-doc, Mike Grissom, took the Talon to the Radio Park Elementary School for demonstrations in three classrooms. First, the robot was teleoperated by Dr. Grissom while Dr. Rahn introduced the students to the vehicle and the electrical, mechanical, and computer engineering required to build it. The robot “responded” to audio commands (it has a microphone). Eventually, the fifth graders guessed that the robot was teleoperated after it answered some tough true/false questions. The third graders (and some of the teachers) initially thought it was just an extremely intelligent robot. The kindergarteners treated it like a pet dog – Robbie the Robot. The students were extremely excited about the visit and even wrote thank-you letters. Many said “I want to be an engineer!”
See selected pdfs here, here, here, and here.
See other Pneumatic, Fluidic, and Inflatable robots here.