
Not so well known is that there were two main types of R2-D2's in the original Star Wars space opera. The models operated by Kenny Baker, the other a radio-controlled (R/C) model. Visually the main difference is the Kenny Baker model only ever had two legs, and the R/C version had three, although the single forwad leg was retractable. This article focuses on the R/C model, plus other R/C robots in the original movie.
For one of the better R2-D2 sites – see here http://www.r2-d2.de/index3.htm
Text and image from Norank's webite here.
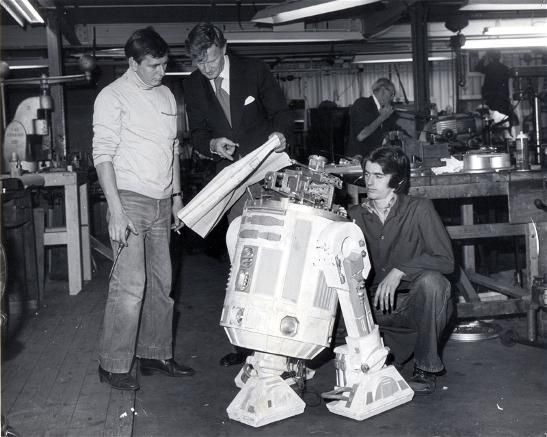
Although our overseas friends sometimes forget, all the best bits of Star Wars were British made. Sometimes when you read the archive books, Elstree is hardly mentioned. But we made R2-D2, C-3PO, the landspeeder, the X-wings, Y-Wings, Millenium Falcon and of course the lightsabers here in our workshop! Above are Malcolm Page, Geoff Burnstein and Harry Hankin adding the finishing touches to John Stear's working R2 in Norank's workshop. His workshop was next door, but much smaller, we had all the lathes, mills, welding kit and expertise for all the metalwork.
See pdf here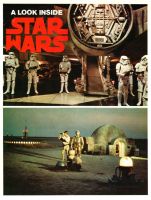
STAR WARS
ELECTRONICS TODAY INTERNATIONAL — DECEMBER 1977
Jim Perry looks behind the scenes and inside the robots
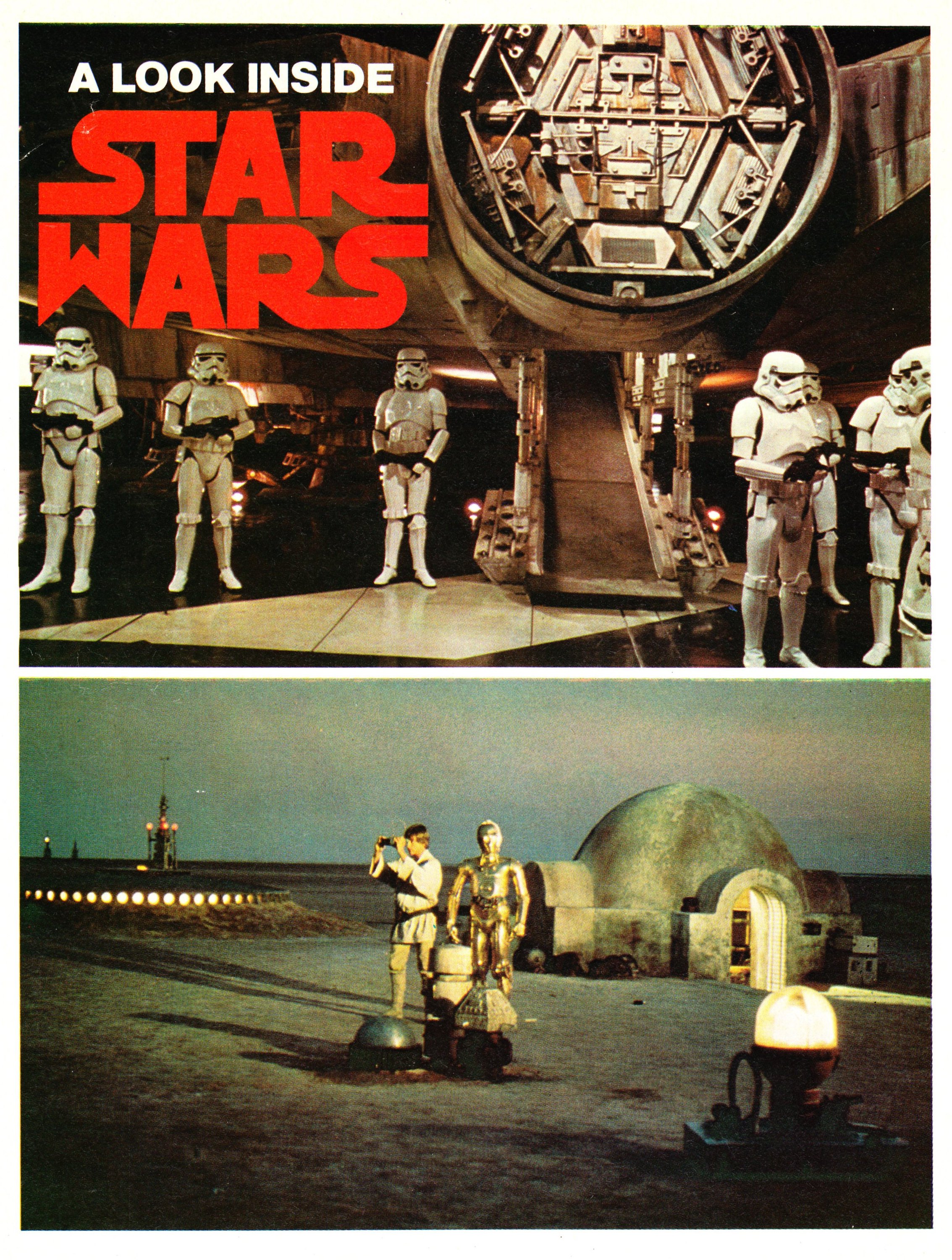
BY THE TIME this story is printed STAR WARS will have probably grossed 200,000,000 dollars worldwide. All those zeros are the result of six years work by writer-director George Lucas, and an end product that makes the TV series Star Trek look as spectacular as Number 96! [A local Australian production]
As early as 1971 George Lucas had the idea of filming a space fantasy. Originally he wanted to make an up-to-date version of Flash Gordon — but couldn't obtain the copyright to the characters created by Alex Raymond. Thwarted by this setback, he started researching the possible sources that inspired Flash Gordon. After a fair bit of digging, he realised that the Flash Gordon concept was probably based on a series of books by Edgar Rice Burroughs (of Tarzan fame) about "John Carter of Mars." In turn it looks as though Burroughs had been inspired by Edwin Arnold's "Gulliver on Mars" published in 1905. Jules Verne had preceded even this but never made his hero battle space creatures or have adventures on distant planets — the basis for a whole new concept (then) in adventure stories.
As soon as he finished American Graffiti George started writing Star Wars — that was in January 1973. He worked on the story virtually full time right up to and even during the actual filming in March 1976. At one point there were four different scripts, each one with a different blend of storyline and characters.
United Artists were the first to be offered the embryo idea, but they turned it down because they couldn't see the potential! Universal were more interested at first, but also gave it the thumbs down. Finally 20th Century Fox were persuaded to back it, but nobody thought it would be a big success — little did they know.
New Worlds
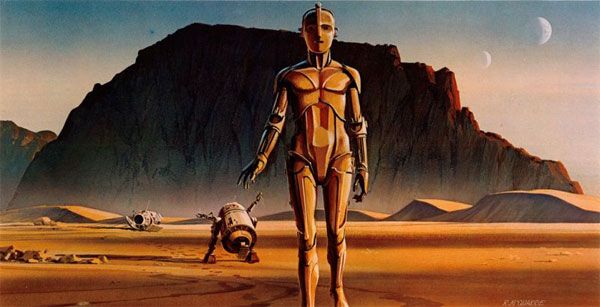
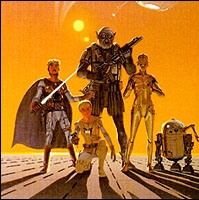
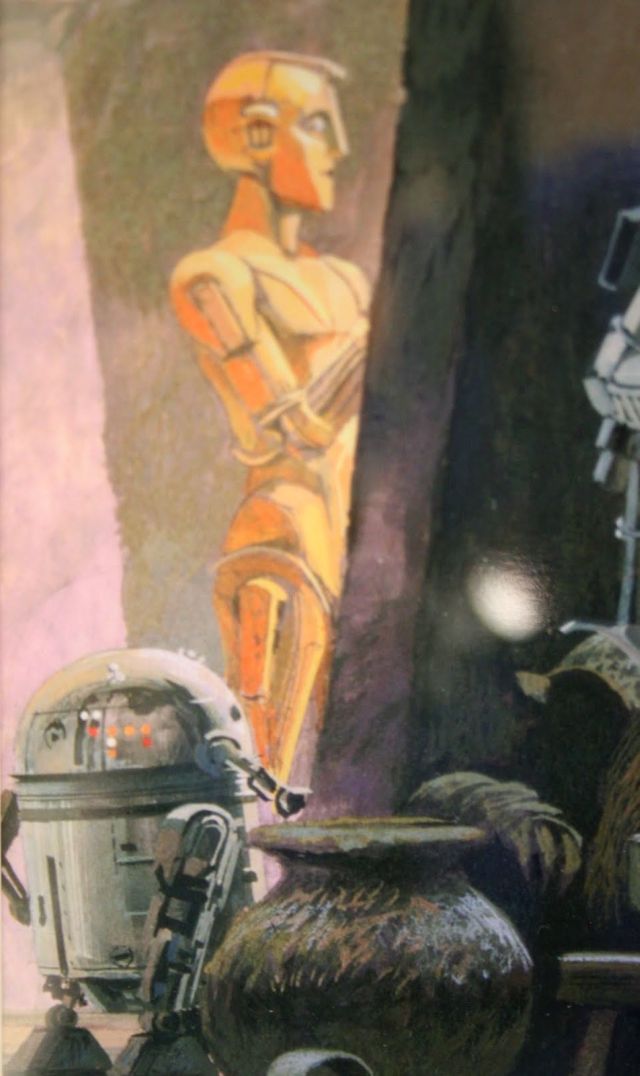
The first step after completing a satisfactory basic script concept was to visualize a whole new world. Collin Cantwell, who had worked on "2001 — A Space Odyssey", was brought in to design the spacecraft models. Starting off with simple sketches, Ralph McQuarrie began visualizing the characters, costumes, robots and scenery — finally producing a series of full colour paintings to give an idea of what George Lucas wanted in various scenes.
Meanwhile producer Gary Kurtz had the headaches of finding a suitable place to film, working out logistics and budgeting. In turn all American, North African and Middle Eastern deserts were visited; the aim was to find a suitable location for Tatooine, the desert planet home of hero Luke Skywalker. Finally the southern part of Tunisia was chosen, near Tozeur in the Sahara desert.
Partly as a result of the decision to film locations in Tunisia, but mainly because of the facilities and people available, the interior work was to be done at EMI Studios in Elstree. It was the only studio complex in England or America that could provide up to nine sound stages simultaneously, and the technical staff are among the best in the world.
Production designer John Barry and his crew began designing and building the huge number of props and sets in August 1975. In order to make things look realistic $40,000 was spent on junk and scrap metal; anything from sewage pipes to jet engines were used to make scenery look realistic. One of the interesting aspects of Star Wars is that everything looks used — just like real life!
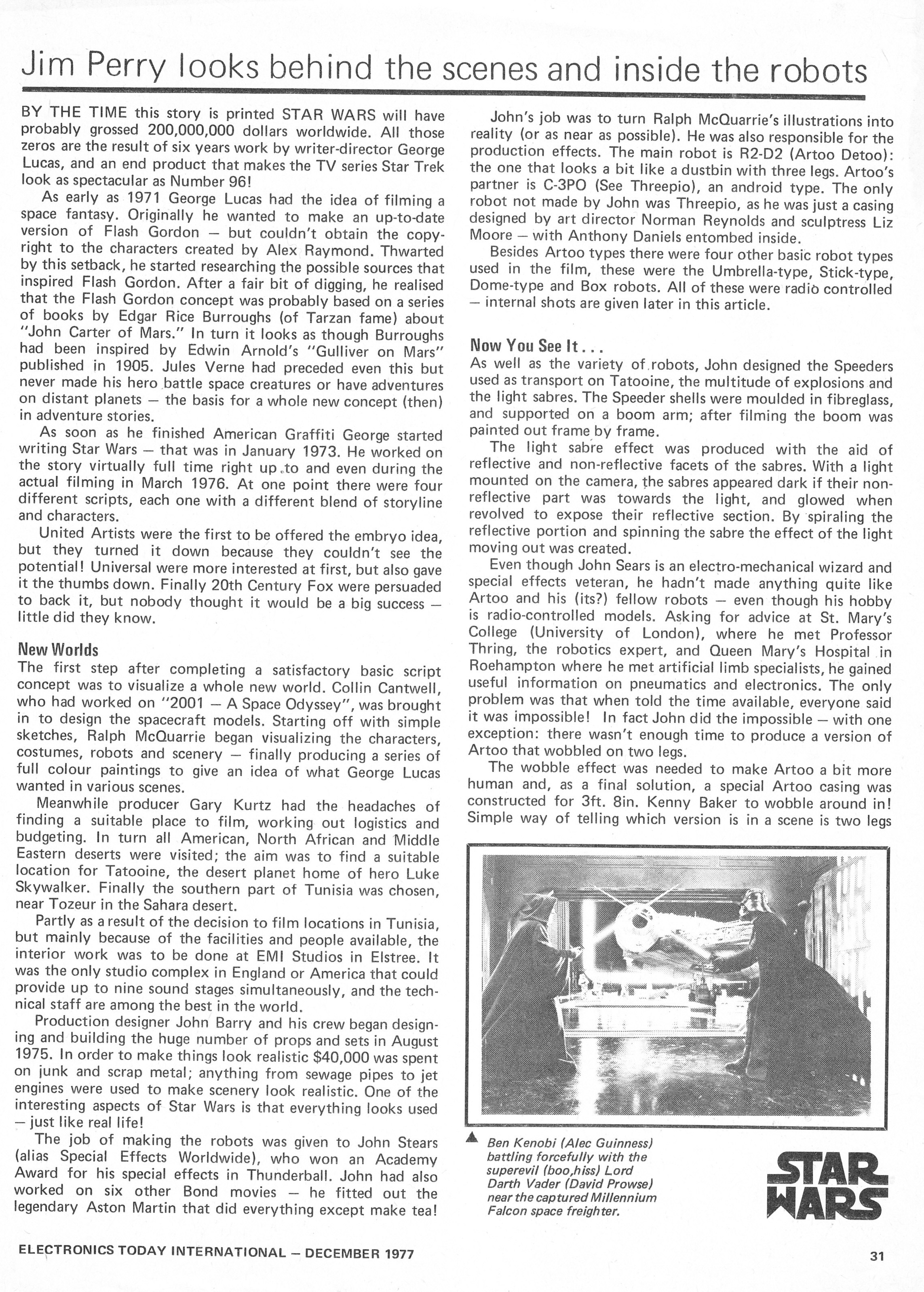
The job of making the robots was given to John Stears (alias Special Effects Worldwide), who won an Academy Award for his special effects in Thunderball. John had also worked on six other Bond movies — he fitted out the legendary Aston Martin that did everything except make tea!John's job was to turn Ralph McQuarrie's illustrations into reality (or as near as possible). He was also responsible for the production effects. The main robot is R2-D2 (Artoo Detoo):
the one that looks a bit like a dustbin with three legs. Artoo's partner is C-3PO (See Threepio), an android type. The only robot not made by John was Threepio, as he was just a casing designed by art director Norman Reynolds and sculptress Liz Moore — with Anthony Daniels entombed inside.
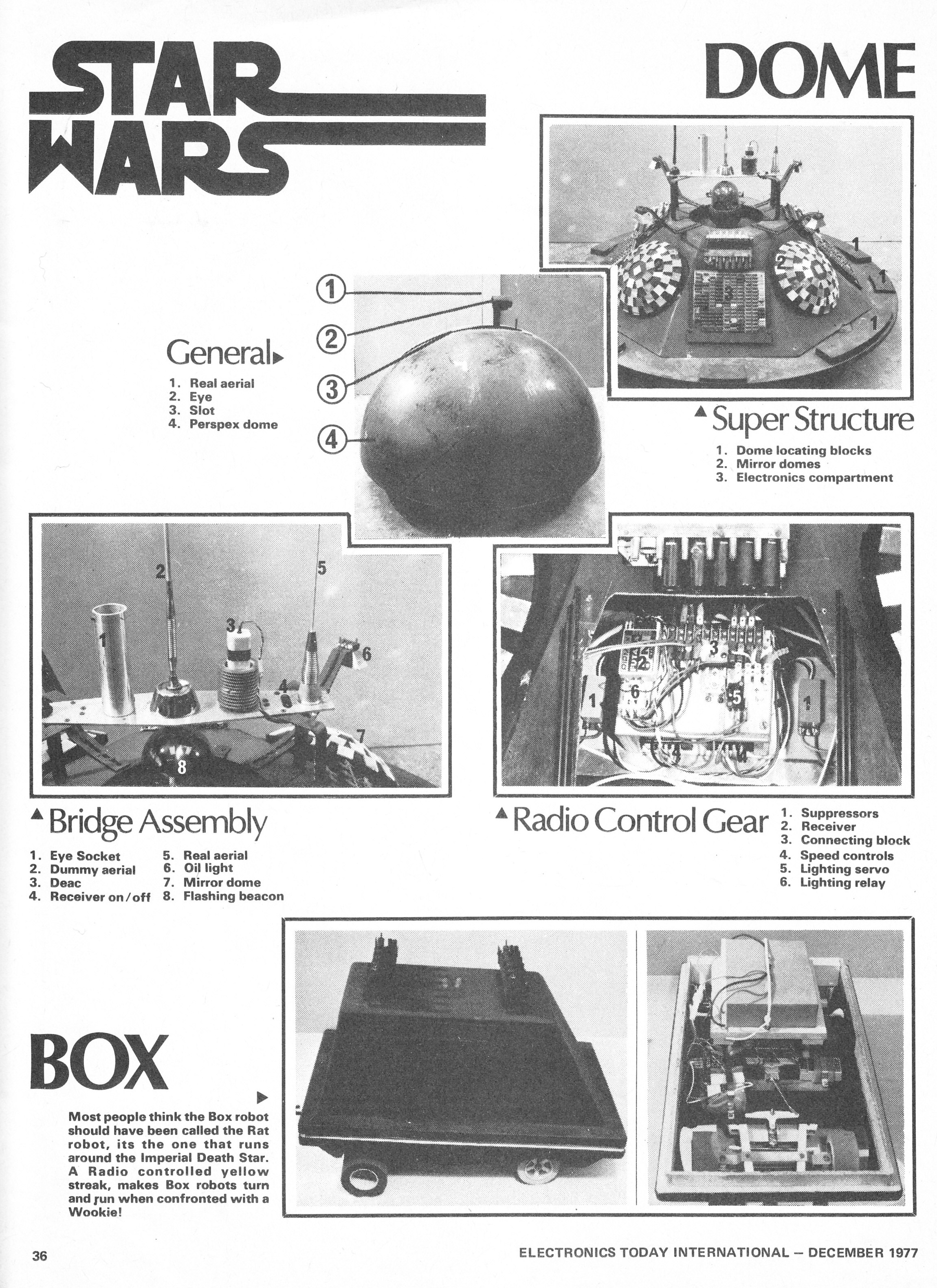
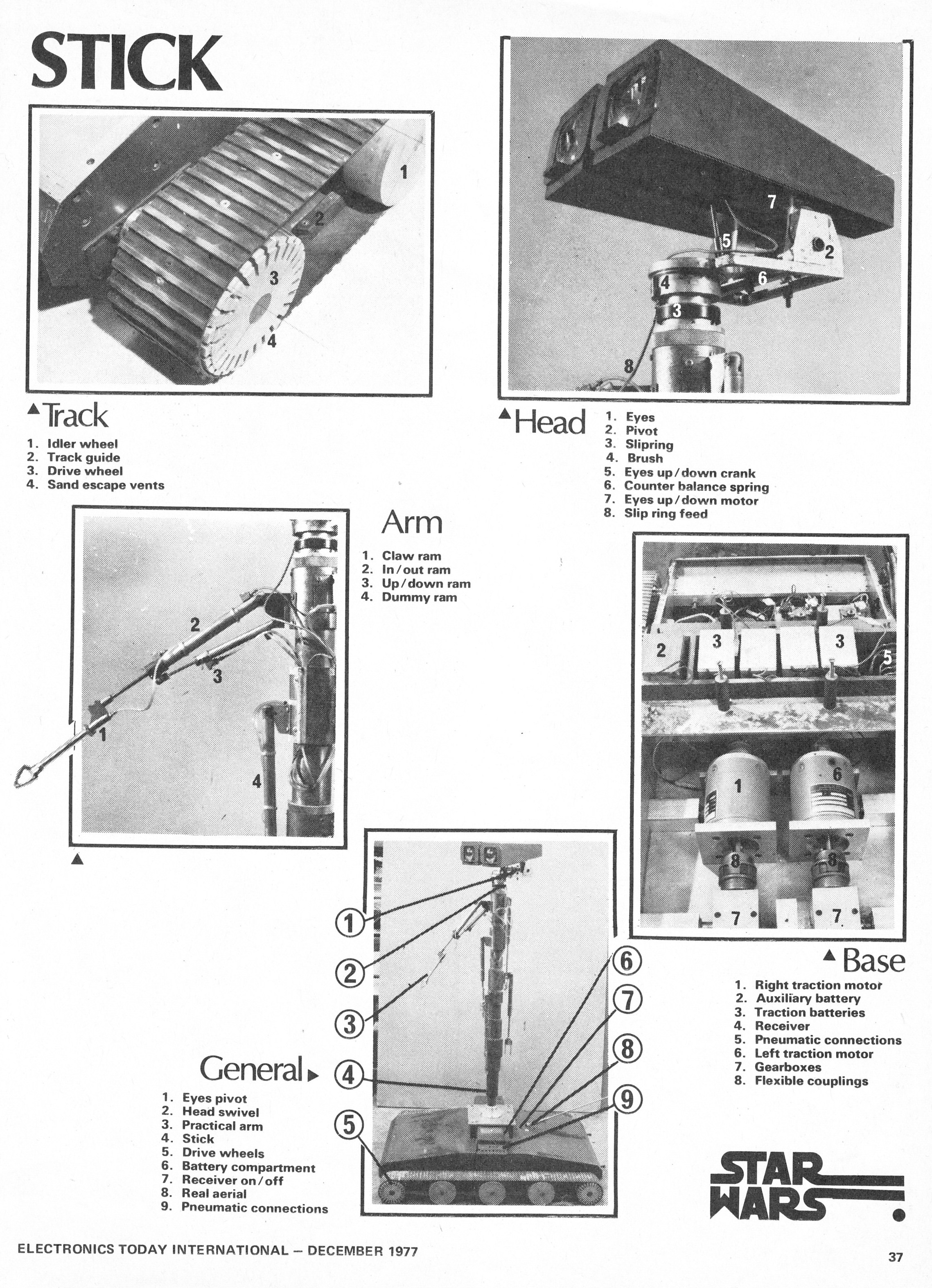
Besides Artoo types there were four other basic robot types used in the film, these were the Umbrella-type, Stick-type, Dome-type and Box robots. All of these were radio controlled — internal shots are given later in this article.
Now You See It …
As well as the variety of robots, John designed the Speeders used as transport on Tatooine, the multitude of explosions and the light sabres. The Speeder shells were moulded in fibreglass, and supported on a boom arm; after filming the boom was painted out frame by frame.
The light sabre effect was produced with the aid of reflective and non-reflective facets of the sabres. With a light mounted on the camera, the sabres appeared dark if their non- reflective part was towards the light, and glowed when revolved to expose their reflective section. By spiraling the reflective portion and spinning the sabre the effect of the light moving out was created.
Even though John Stears is an electro-mechanical wizard and special effects veteran, he hadn't made anything quite like Artoo and his (its?) fellow robots — even though his hobby is radio-controlled models. Asking for advice at St. Mary's College (University of London), where he met Professor Thring, the robotics expert, and Queen Mary's Hospital in Roehampton where he met artificial limb specialists, he gained useful information on pneumatics and electronics. The only problem was that when told the time available, everyone said it was impossible! In fact John did the impossible — with one exception: there wasn't enough time to produce a version of Artoo that wobbled on two legs.
The wobble effect was needed to make Artoo a bit more human and, as a final solution, a special Artoo casing was constructed for 3ft. 8in. Kenny Baker to wobble around in!
Simple way of telling which version is in a scene is two legs31
Kenny, three legs the real Artoo with radio control. In March, 1976, the production unit moved into Tozeur in the South of Tunisia, to begin the transformation of desert into desert (from a different galaxy), and construction of massive Jawa transport vehicles. The Algerian army caught sight of these massive props and thought they were real!
After eight weeks of preparation the filming started. During the first week the entire crew had to wear sand goggles due to a big sandstorm. The filming lasted two-and-a-half weeks on location before moving to Elstree for the next 141/2 weeks, where all nine sound stages were filled with John Barry's 30 sets. Planets, starships, caves, control rooms, cantinas and a vast network of corridors from inside the Death Star were at Elstree — but the Alliance's secret hangar full of X-wing and Y-wing fighters had to be built at Shepparton Studios, because it was the only place in Europe big enough!
When on location all the robots had to be cleaned every day the sand and salt got in everywhere! One problem arose with the radio control systems because of static-charged windborne sand particles present in the Sahara; an extra aerial wire had to be attached to Artoo. Also being miles from nowhere the internal batteries had to be charged from mobile generators, which also had to be maintained. Trying to keep track of up to 30 sets of batteries is guaranteed to give anyone a twitch! Artoo and company were operated by John Stears and his crew, with Dick Hewitt (of Compact Video Systems) supervising the electronics.Built from Scratch
As well as the robots and mechanical effects, Star Wars uses the most advanced optical and miniature effects — the deep space shots, laser guns, etc. In June 1975 John Dykstra was asked to supervise all the photographic special effects. There was a slight problem — no commercial facility had either the time or even equipment to produce what was required — so John built Industrial Light and Magic Corporation, from scratch, in an empty warehouse in the San Fernando Valley.
The ILM complex included a carpentry shop and machine shop, which had to build or modify the special camera, animation equipment, editing and projection equipment needed to produce the effects. Other departments included optical printing (for putting the many different layers of film together), a rotoscope department (for matte work and general backgrounds) and a library section for keeping track of the thousands of pieces of film.
Dykstraflex
The most important part of ILM is the Dykstraflex camera, which is based on an old VistaVision camera, linked into a computer. The VistaVision camera runs 35mm film through sideways, like a 35mm still camera, whereas normal movie cameras run the film vertically — the benefit is increased resolution, which is needed when up to 12 shots are put together on one print. The computer is used to store movement with control of seven separate parameters simultaneously.
Each of the 365 special effects needed between two and 12 separate exposures of film, in all 3 838 exposures were needed.
For example, in the battle sequence you see an X-wing fighter swooping and soaring over the Death Star — in fact, the model of the X-wing never moved an inch! The camera moves, creating the illusion that the fighter is moving; the Death Star is filmed separately with different camera movements. The two exposures are then printed together to create the impression of X-wing swooping over revolving Death Star — not to mention more fighters, laser flashers, stars, etc.
This is where the computer comes in. If the angle of the camera changes during a shot, the other shots change as well — hence each separate frame has to be exactly matched for each different component of the composite shot. The computer remembers everything and moves the camera accordingly — simple, but until the Dykstraflex, no camera could do it.
To create realism in the dogfight scenes, thousands of feet of World War II movies were viewed, together with storyboards. By studying the real life movements of the planes,
32
the model shots were planned to be the most realistic ever made — they succeeded.
Even with the aid of the Dykstraflex the I LM crew had several problems to solve. It was easy for the director to move his hand, and say "I want the starship to move like this . .." but to actually turn this into a finished shot was a problem.Firstly the movement had to be put down on paper, so that the camera operator could try and emulate the movement — then the operator had to teach the computer the movement, in fact he had to 'fly' the camera over the fixed model. Needless to say at the end of the filming the camera operators were all accomplished pilots!
33
STAR WARS R2-D2
Contrary to some reports, most of the R2-D2 sequences were with a real robot, built by mechanical wizard John Stears — read all about the real R2-D2 here!
TWO VERSIONS of R2-D2 were made, one for Kenny Baker to fit inside and the three-legged radio controlled version. Our interest centered on the radio controlled version.
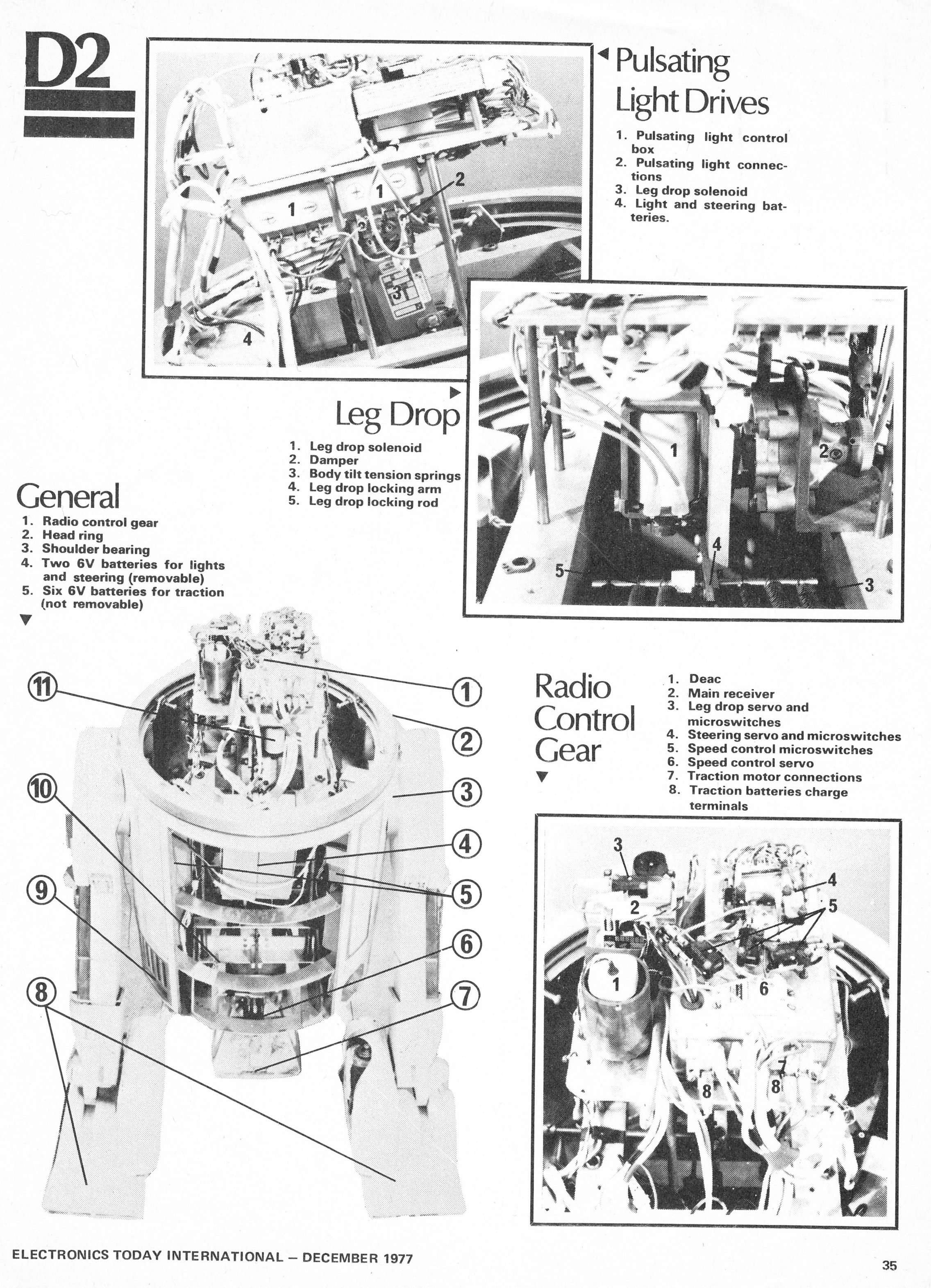
R2-D2 has three forward speeds, but no reverse, and is steerable. Provision is made for the change from two legs to three legs by radio control, also when tilted the third leg drops automatically. The reason for this is that R2 would fall over if left on only two legs!
Mechanical
In order to achieve forward motion, the two rear legs have individual traction motors which drive twin inline wheels. Steering is via the front drop leg, with a proportional self centreing servo unit. The twin wheels in the steering foot remain parallel to the other wheels during turns.
The front leg and foot can be retracted inside the body. When the front leg drops it is held at the correct distance by wires, R2-D2 can then move off at full speed.
The casings for all the R2s were specially made by a company called Petric Engineering for the modest sum of almost $30,000, which may seem a trifle high — but they were precision pieces of engineering to the highest standard, in fact John Stears says they were excellent value.
Cleaning Up
For several of the scenes R2-D2 was made to appear thoroughly blasted, or covered in grime. The only way was to virtually blast it in real life, and then clean up for the next shot.
While in the Tunisian desert John Stears was also continuously cleaning real dirt and sand from R2, it got in everywhere!
^ Above, R2—D2 in two stages of disorder — heart-breaking work, wrecking such a nice machine!
V Below, John Stears gropes under R2—D2 on location, even the best robots need repairs.
34
Thanks are due to John Stears and 20th Century Fox for their help in producing this feature. All photographs are world copyright 20th Century Fox Corporation.

Click on images for a larger image.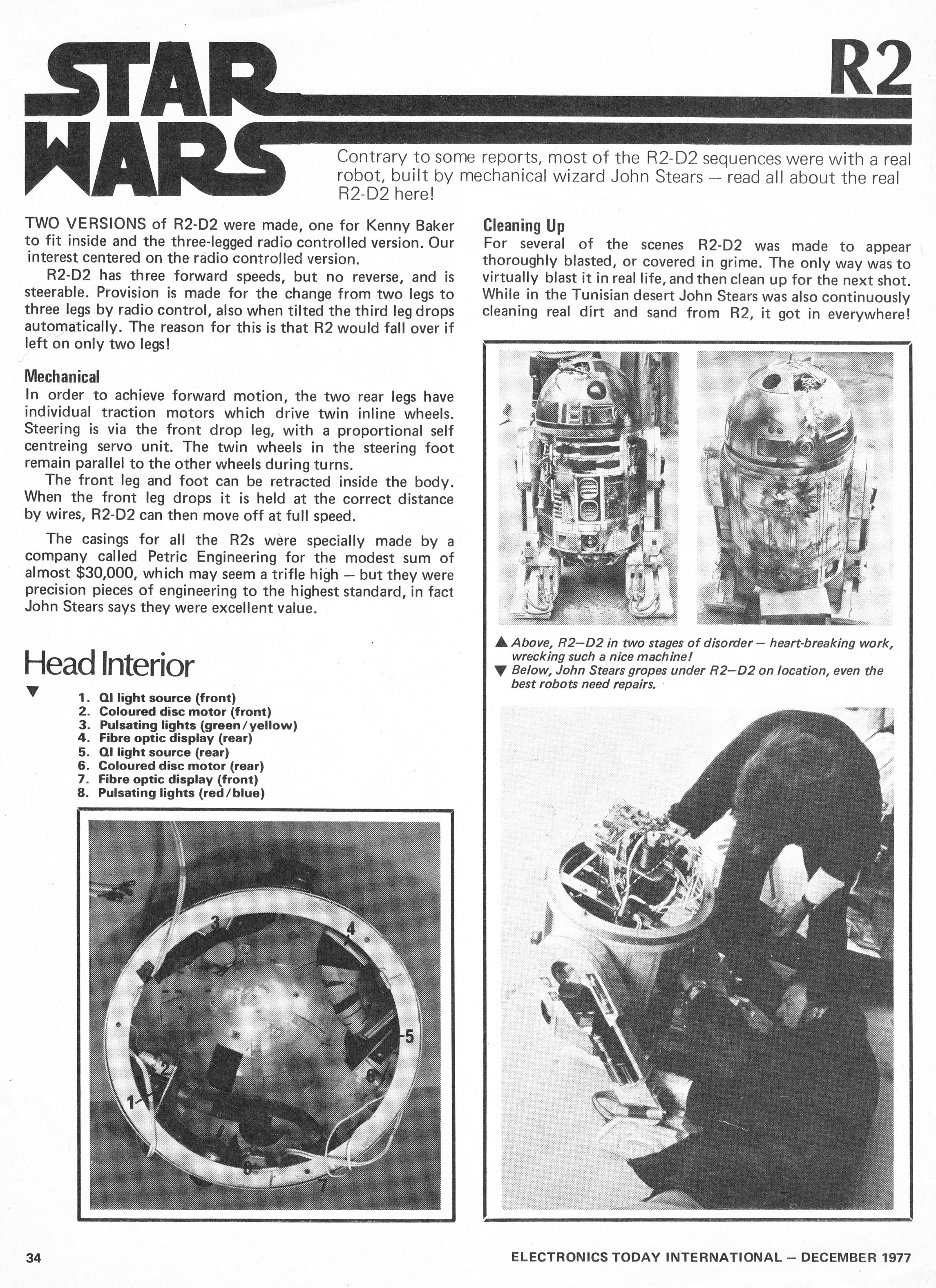

All the droids at Elstree Studio.

Kenny Baker enjoying a snack during a break.

John Stears, the SFX Supervisor responsible for building R2-D2.
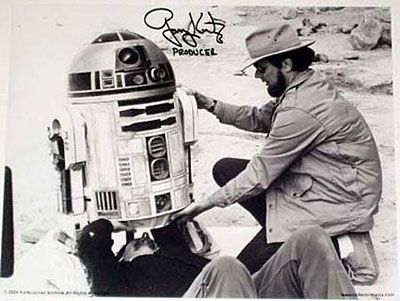
Garry Kurtz, the producer, with R2-D2.
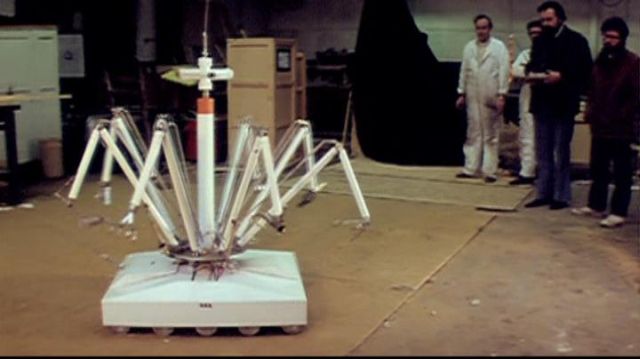
The "Umbrella" droid.
See source here.
Interface Age April 1978
Star Wars Special Production and Mechanical Effects
By John Stears
Special Production and Mechanical Effects Supervisor “Star Wars”Although the robots that appeared in “Star Wars” were not true robots, they did stir a great deal of interest. Consequently, we asked the genius behind them, John Stears, to give us an idea of what went into their design.
We would like to thank the Star Wars Corporation, and Twentieth Century-Fox Corporation, for giving us permission to use this story. —Editor
DEVELOPMENT AND DESIGN OF ALL ARTOO-DETOO ROBOTS
(In conjunction with the production designer, who was responsible for their general appearance.) The problems were many, inasmuch that the director wanted to use a human as much as he could so as not to loose the character to a pure mechanical machine. This posed the question of how small a human, sufficiently coordinated and physically able, could be found. I obviously had to design my robot around the person selected, bearing in mind the limitations of what the operator inside could possibly do without undue strain, as he was to be inside for long periods in the discomfort of the desert sun and the studio lighting.
After selecting our midget (Kenny Baker), the first problem was to make him as comfortable as possible, yet make his shell as small as we could. This was accomplished by a harness over his shoulders attached to a seat. This took the weight off him until we were ready to turn the camera, the robot being supported externally until the last second. One of the big problems, as you can see, was weight, and how to keep it as low as possible.
The next major problem was how to get him to walk. The various types of surfaces he had to walk on were to range from soft sand, salt often saturated, uneven stones and shiny slippery studio sets. One added disadvantage was that often it was not to be a level surface.
This was achieved by various types of surface on his boots, which ranged from a series of non-return rollers to give a forward movement, to others which had a number of spring loaded balls on each side of the boot, which enabled him to sway from side to side. A very important factor was vision for the man inside to enable him to walk to his marks and most important to keep his balance. This was done by a one-way lens in the detachable head, which was on roller bearings to allow it to be turned 360 degrees by the operator (Kenny), although he could turn his head from side to side. The actual majority of weight which was displaced when he walked, i.e., the side to side action, was assisted by spring loaded pistons placed externally on the legs.
The external arms which had to function were counterbalanced in order to let the operator lift and perform the various tasks required. The amount of room he had to move his fingers, which were of short stumpy type associated with dwarf genetics, was possibly no more than 1".
In order to give Artoo-Detoo a visible change in mood, I used fibre optics, which in turn illuminated a panel in the head. Using colors to give the effect of a change in mood was accomplished by using a single light source with a motorized color wheel.
Other light sources were installed for the hologram projector, all of which were powered by high-output, jelly-type non-spill batteries.
There was nothing used in the manufacture of both Artoo’s which was not machined, with the exception of the viewing lens. I was totally responsible for their creation, apart of course, from their conception, which was George Lucas’s; and their cosmetics which, as I said, Was done in conjunction with the art director.
A mechanical version was necessary because in order to move quickly a third leg had to be dropped in the center in action, which allowed it to be steerable. Infinite speed up to 7 mph was achieved through twin high torque motors mounted in the feet of the outside legs. The steering was by a two wheel mechanism in the front leg, the name of which does not exist and made no sense to anyone until it was installed and worked.
Mechanical Artoo was controlled by using a conventional radio transmitter and receiver as is used for flying models and boats. The servos in turn were hooked up to various relays and speed controllers for the operations required. The main power was supplied by a series of 6 volt jelly batteries.
Although everything checked out beautifully on the one and only test it had in the studio, we had a bad time for a few hours in the desert. A sand storm, which created very bad static, affected our transmitter range. This resulted in Artoo-Detoo and Threepio appearing to copulate in front of the unit in the middle of the desert. Up until now it appears to have been futile, but one can’t be too sure of the gestation period of robots.
Apart from this incident, and a bit of damage to the dropping leg caused in transit, all the robots functioned well.
TREAD ROBOTS
There were four of these, which are incidental to the two principal robots, Artoo-Detoo and See-Threepio.
The Baby Box is the odd one out here because it functioned in the Death Star only. It is the little black box which careens around doing its thing, which includes a little cameo of mine in the reaction it gives when it sees the Wookie. It screeches to a halt and does an immediate about-turn and shoots off at an alarming rate in the opposite direction. There were several of these Baby Box Robots, some of which pulled many trucks behind them.
The Dome Robot as seen with the others by The Sand Crawler is really, in my view, the power source for the others to re-charge themselves by. Inside the smoked perspex dome is a rotating solar panel by means of which it collects solar energy and stores it for the other robots to plug in and recharge their own batteries.
The Stick Robot, which assists Luke at the vaporizing units, had a pneumatically operated arm. Unfortunately it is not featured in the final cut.
The Umbrella Robot has electrically powered features and a pneumatic scoop for collecting soil samples.
All of these robots were radio controlled. The main problem was the terrain they were to be operated in: hard compressed sand, loose sand, dry salt, wet salt and small rocky areas. They had to be very powerful and weighed in at around 250 pounds each. They had to be capable of handling steep grades and turn in their own length. The biggest problem I had was to make a self-cleaning tank track; one which would not push itself or the wheels through a build up of sand, etc., but would stay put no matter what. On close inspection you will see how I did this. Radio controlled model aircraft is one of my hobbies, which enabled me to operate the robots with any sort of precision. I had a few problems when my crew members had to operate them, because of more than one robot in a shot. They did very well, though.
SEE-THREEPIO
See-Threepio, being a humanoid, I was not involved with, apart from helping out with articulation problems and his illuminated eyes. These I accomplished with one way lenses, incorporating the light source.
I was responsible entirely for his oil bath.
—————-
Trivia: from above article
"Although everything checked out beautifully on the one and only test it had in the studio, we had a bad time for a few hours in the desert. A sand storm, which created very bad static, affected our transmitter range. This resulted in Artoo-Detoo and Threepio appearing to copulate in front of the unit in the middle of the desert. Up until now it appears to have been futile, but one can’t be too sure of the gestation period of robots."You won't see this type of commentary published these day!
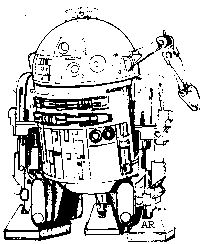
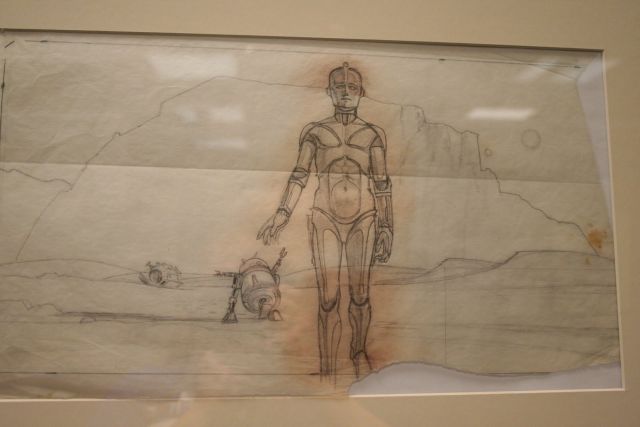
Original R2-D2 concepts by Ralph McQuarrie.
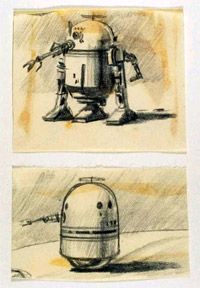 An early concept had R2-D2 moving on a single, large ball.
An early concept had R2-D2 moving on a single, large ball.
Note R2-D2's two arms and walking like a tripod.



The late Grant McCune applying some finishing touches with the paint brush. After McQuarrie completed his concept drawings, McCune, working for Lucasfilm in California, produced the working designs. John Stears , at the Elstree Studios in London, then had the job of realizing these designs.
See other early Humanoid Robots here.