Azor Dog was constructed by Janusz Wojciechowski. He is the author of many books for young amateur electronics technicians, in present considered as legendary. Azor Dog was prototyped in 1958 together with A. Lonchinskim, presented on a TV show in 1960. Two years later in 1962 book was issued with detailed description of the toy titled "Electronic dog and other interesting toys" (loosely translated). This book is the source of pictures and diagrams presented here. Later on, the construction was updated to a "conditioned reflex" model, now called "Super Azor".
Photos supplied by Waldemar Dekanski of Poland.
English translation from the above book.
Dogs "Azor" and "Super Azor"
Dogs "Azor" and "Super Azor."It is quite popular in our time cybernetic toys, like e-utans?. 1958 . Their prototype was designed in 1958 by the author of this book, together with A. Lonchinskim. "Azor" (see Fig. 13.9) in its basic version control light and has a very simple design (Fig. 13.10, b). Super Azor "had a more complex structure (ground sensors, the mechanism to avoid obstructions, the elements that are sensitive to sound and heat) and also had a conditioned reflex (Fig. 13.11).

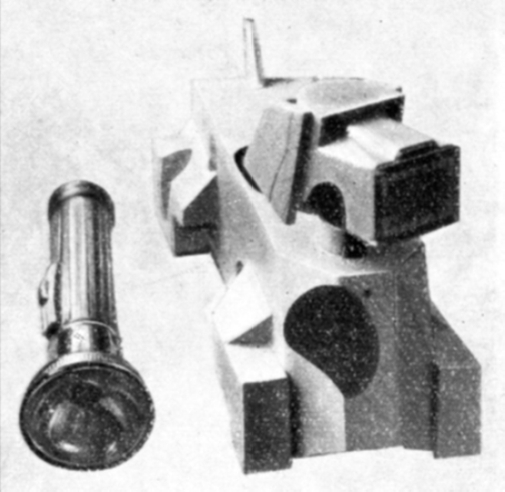
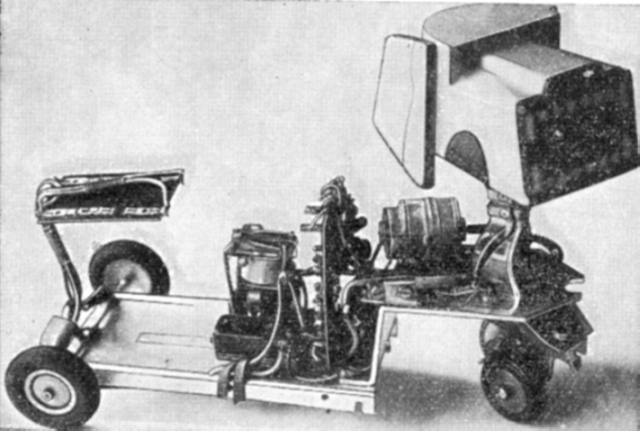
(fig.13.9) cybernetic dog "Azor" (general form and structure). Length 255, width 117, height 155 mm. Speed 9 m / min. Is sensitive to daylight and artificial light (except for fluorescent light), Range, m: 0.3 0.9 3.0 Lamp power, W: 0,7 60 500.
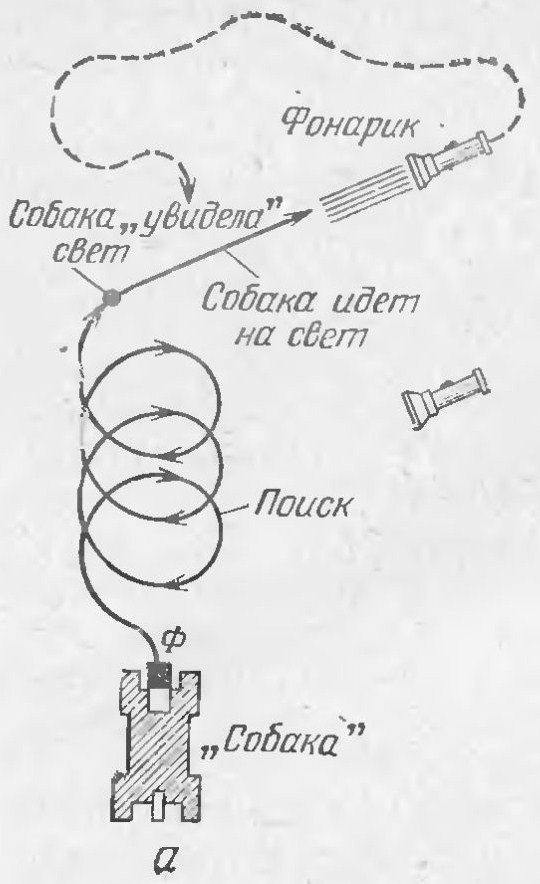
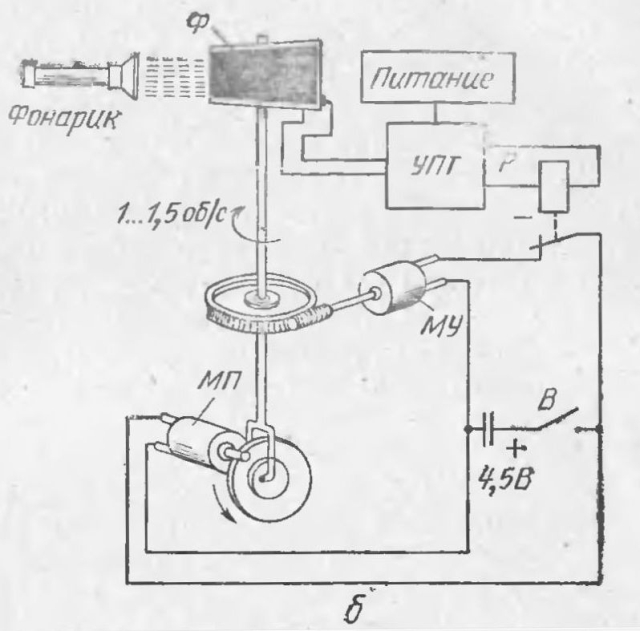
(fig.13.10) cybernetic dog "Azor": a – in pursuit of a light source, b – a functional diagram of photo –
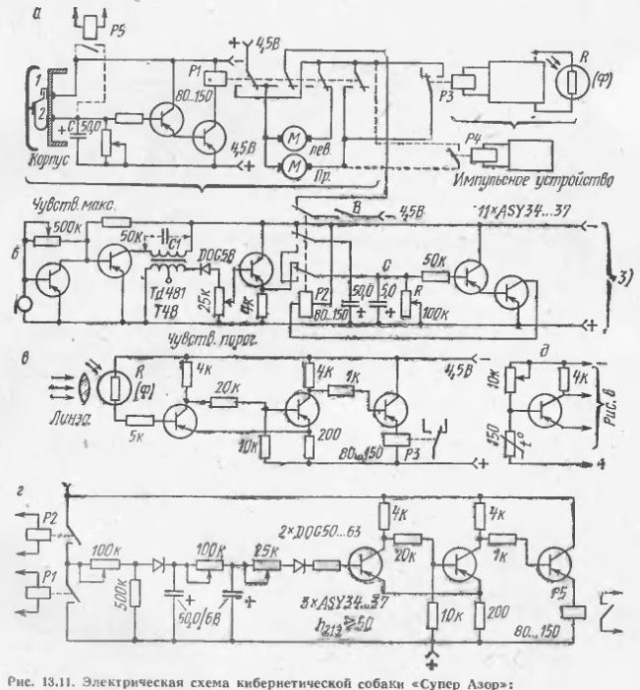
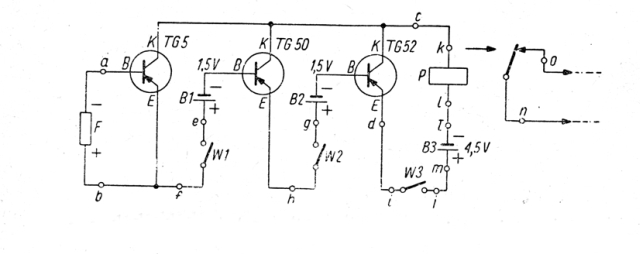
(fig.13.11) Electrical circuit cyber dog "Super Azor": a management-driven, b – acoustic relay; g – unit "conditioned reflex"; d – temperature switch with thermistor
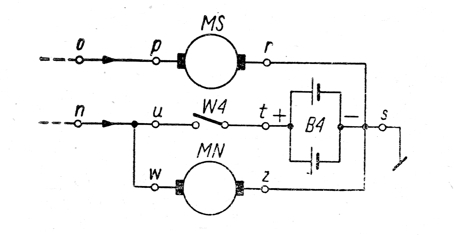
Legend in the diagrams: MU – controlling the electric motor, MB – the leading motor, TF – transistor dc amplifier, P – electromagnetic relay, F – photocell (eg, selenium 20 X 40 mm from the meter or any other) 1 and 2 – the buffer change of direction movement (back, sideways and forward). This chain of RC can be replaced by thermistors, RH – photoelectric (for example, see Fig. 4.1, a), P2 – acoustic relay with a piezoelectric microphone or any other (Fig. 13.11, b) (RC chain can also be replaced by a thermistor) .
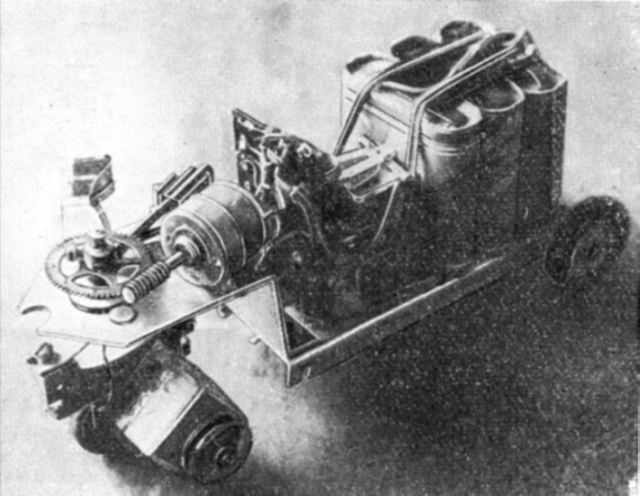
Chassis first samples of "Azora" had a cart and a special drive. Later, we simplified the mechanical work, use one electromechanical toy. You can also use the structure shown in Fig. 13.9. In the Azores "used a selenium photocell from fotoeksponometra. Of course, it can be replaced by photodiodes or photoconductors with the addition of a converging lens (Fig. 13.11, c).
It behaves electronic dog "Super Azor?
She tries to get to the source of light. To "consider" the surroundings, it can move in a straight line or arc. The dog is able to react to sound. Hearing the whistle, it freezes without movement. If the road to meet an obstacle, "Azor" after a collision with it will bypass it – to step back and sideways and go forward in a new direction. The sound heard in a collision with an obstacle, do not stop the dog, she will remember the fact that the sound barrier and appeared simultaneously. After several such collisions is only when a dog whistle produces a conditioned reflex. It will bypass the obstacles, barely hearing the beep. When the "Azor" sees the light, he stops walking and goes to him.
In other words, using the sensitivity of the sensor device that detects a collision with an obstacle, and a microphone with an amplifier, responsive to the whistle of a certain frequency, as well as the storage device gives the following scheme of dog behavior:
– A dog does not respond to sound, if it does not involve touching;
– If during the forward movement dog run into an obstacle, at 2 … 3 is included with the program bypass the obstacles – dog retrogressing, turns, and then again moving forward.
Thus, the sound becomes "Azor" conditioned stimulus, and the collision with the barrier – unconditional, and after 5 … 10-fold repetition of the alarm and meet with an obstacle the dog "learns" these events and begins to react to sound like and the obstacle, ie, the program includes work around obstacles. If, after making "reflex" crash is not accompanied by sound, the dog some time later "forgets" sound signals, and ceases to respond to them. In addition, the dog is able to find the source of light, while the search can take place in difficult conditions, for example, in the presence of obstacles. When faced with the obstacle the dog runs the above program of work around the obstacles. Find the light source is carried photosensitive device F.
In search of a light source the dog moves in a straight line or a circle. Speed should be 0,1 … 0,15 m / s, can also teach the "Azor" stop at the whistle.
Running a little ahead, it should be said about the possibilities to improve cyber dog.
When battery power can "compel" the dog will automatically go into search mode of food – a source of charge vol. Find the light source can be combined with maneuvers caused an audible signal, etc.
Especially interesting to observe the behavior of several identical dogs. Simultaneous search in the same light source is mutual collisions. In this case, the winning dog has the best program of work around obstructions. Now it is easy to organize a "football match", using the search engine of the ball and the gates of the enemy. The search function illuminated gate is performed when the dog finds the ball and start pushing him in front of him, holding between the rods at the front of hull. Similarly, I create a lot of entertaining and instructive cyber games.
What is needed, but the desire to create such a dog or a turtle?
Light sensors – a resistor. To limit the field of view before the photoconductors place simple objects, such as a magnifying glass with a focal length of 40 … 50 mm. This helps "Azor" choose the direction of light. Photoresistor can be placed in the body, instead of applying the lens aperture.
Acoustic transducers (microphone, amplifier and low frequency relay P2). To protect against accidental actuation during the appearance of internal interference apply selective amplifier tuned to the frequency of the whistle (eg, 3 kHz).
Link delay is necessary in order to relay P2 worked through 2 … 3 s after the beep. Piezoelectric microphone can be replaced by conventional, for example, dynamic and even the electromagnetic head of the phone. Carbon microphone is not suitable for our purposes, since it creates a noise caused by the movement of coal powder in motion the dogs.
The buffer helps the dog to bypass the blockage. Azor had only one buffer – the front, but it would be better to add one more – the rear. This would provide a control loop around the dog. Then, for example, in a collision with an obstacle triggered one of the three contacts in parallel and placed in the middle of the buffer and on the edges of it. With the closure of either of them relays P1 triggered. If the dog is moving back, run into an obstacle, it stops.
Chassis – a platform on three or four wheels, front wheels are leading and managing. The drive wheel is carried out by individual electric motors 1 … 5 watts each. You can also use an engine crawler, with a separate drive for each track.
Programing mechanism. The dog, to find the source of light, turns into some or direction. Rotation is carried out with the relay, switching every 8 … 10 seconds from one operating condition to another.
Power is provided from the battery nickel-cadmium batteries.
Joint work of individual devices is shown in Fig. 13.13. Housing Profile imitates a dog, cat, turtle. As an indicator of a collision with the barrier is not only the above buffer, but also the entire body of the animal, mounted on a stand. "Super Azor" can be used in scientific experiments.

(fig. 13.12) Program chase cyber dog "Super Azor" for light source
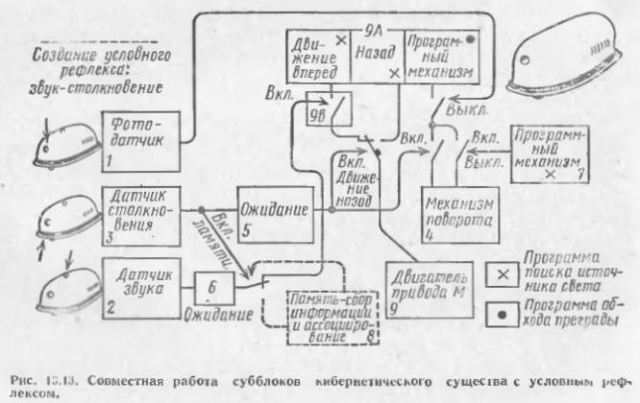
(fig. 13.13) Teamwork subunits of cybernetic creatures from the conditioned reflex

Below – Azor with Eva, the r/c robot.
