Shadow Biped Walker by David Buckley – 1988

Information sourced from my friend David Buckley's own website here http://davidbuckley.net/DB/ShadBiped.htm.
Shadow Walker – Retired in 2002
A two legged human sized pneumatic powered walking robot.
Design and building started 1988.
Size – 5ft 6inches high, weight about 80lb
Operational area:- safety supporting frame 4ft * 8ft * 8ft plus host computer, a small compressor fits under the host computer's table.
Shadow Biped appearances:
1990 – the BBC TV program Tomorrow's World, live on 18th January 1990.
1990 – Robotix, The Robot Olympics Glasgow 1990 – Gold Medal for Best Robot at Robotix
1990 – The Garden Party, TV program 12th September 1990.
1996 – Robotix96, The Robot Olympics Glasgow 1996 voted 'Best Robot' by attendees.
2002 – Robodex (Japan). Invited by the organisers, voted favourite Robot by an exit poll.
Back in 1988 when the Shadow Group was new, Richard Greenhill, the founder and funder of the Group, was working on a shrugging shoulder which he thought was necessary for a robot or human to lift heavy weights such as suitcases. For David this wasn't a very fascinating aspect of robotics and he suggested that in order to attract members the group needed an appealing and challenging project such as the full sized biped robot they had often talked about. Rather than wait until everything was developed, the group could start with the legs and add the other parts as they went on. So the project to build the first Shadow Biped Walker was set in motion.
David Buckley drew up plans for the skeleton, researched medical texts for muscle placements and designed the electronics so the group could run the walker from an Acorn Archimedes computer. Richard Moyle and David Buckley built the skeleton and the electronics were built by various other members of the group. Richard Greenhill designed and built the muscles (his development of the McKibben muscle) and attached them to the legs. All the joints had potentiometers attached for position feedback and all the muscles had tension sensors. The next step was to build the pneumatic valve sets to drive the muscles.
David Buckley was working abroad and when he came back others in the group had built the two sets of air valves and switches seen in the photograph. They took up all of the body space leaving no room for any arm mechanism at all! David was very disappointed but what was built was built, maybe it was his fault for not drawing up the arms, he thought to himself. David Tricket built a pressure sensor panel with modified pressure dial gauges so everyone and the computer could read the pressure in each muscle and this was attached to the back of the robot.
Richard Walker took over writing software experimenting with all sorts of neural nets trying to get the walker to learn how to stand.
Since the robot used McKibben muscles David Buckley hoped it would be quite flexible but Richard Greenhill kept pressing for more force from the muscles and in the end it was very highly strung and could nearly stand up without any compressed air in the muscles at all!
During this time David Buckley was spending time working abroad so had little control of what went on with the robot and one time when he returned the group had decided that since some of the potentiometer fixings had come loose instead of securing them they would take off all of them and replace them with analog optical sensors.
After a lot of work especially by Richard Greenhill, in getting the sensors to work, Richard Walker discovered they were not monotonic and so more time and effort was expended on them.
The original valves were 110vac (used because Richard Greenhill bought them cheaply from Proops at around £1 each) but Richard Walker thought they didn't have enough through flow to fill the muscles fast enough for his control software to work. So they were all changed for 12v washing machine valves with enormous flow capacity. In doing so it was discovered that the reason the old valves couldn't supply the necessary air was that most of the connections in the pressure sensor panel virtually sealed off the supply and simply making them good would have been sufficient. The new valves required large fittings and only cast-iron ones were available, this set another problem because the group member who modified them didn't clean them thoroughly and they all went rusty and particles stopped the valves from working. An all night session stripping and cleaning everything was required so the robot could be shown, probably at the Robot Olympics 1996.
The new valves brought their own problems, they had rubber diaphragms and pressure bleed holes and didn't respond well to being pulsed, but Richard Walker eventually managed to tame them.
In 1998 David Buckley moved into a new house in the North of England and the walker was transferred from the Shadow labs in London with the idea that he could continue to work on it at home. However after inspecting it he realised that it would take as much work to refurbish as to build a new walker and so it was decided to retire it. The walker now hangs on the wall of the Shadow labs.
Sadly after returning from Robodex 2002 the Biped was never put back together. In 2008 the valve blocks were in a store cupboard… and the rest?…
valve blocks.
For more information see http://www.shadow.org.uk/projects/biped.shtml
A good place for Biped links is androidworld.com – see Biped Projects
[photographs of the Shadow Biped by Richard Greenhill]
Shadow leg

Robotic-Leg for medical research into powered prosthetics, North Carolina A & T University 2005 by David Buckley.
The human sized Leg was made for the Shadow Robot Co. as part of a contract from North Carolina A & T University and my understanding is that it was to be used at North Carolina A & T University in a research program which would investigate myoelectric control of powered prosthetic legs. The program was to be overseen by Dr. Gary L. Lebby, a Research Professor in the Department of Electrical and Computer Engineering.
The actuators are Shadow Air muscles, a development of the McKibben artificial muscle.
Material – white acetal plate.
The leg was fitted with the control system used by the Shadow Hand
See David Buckley's website for further photos, video clip and other details.
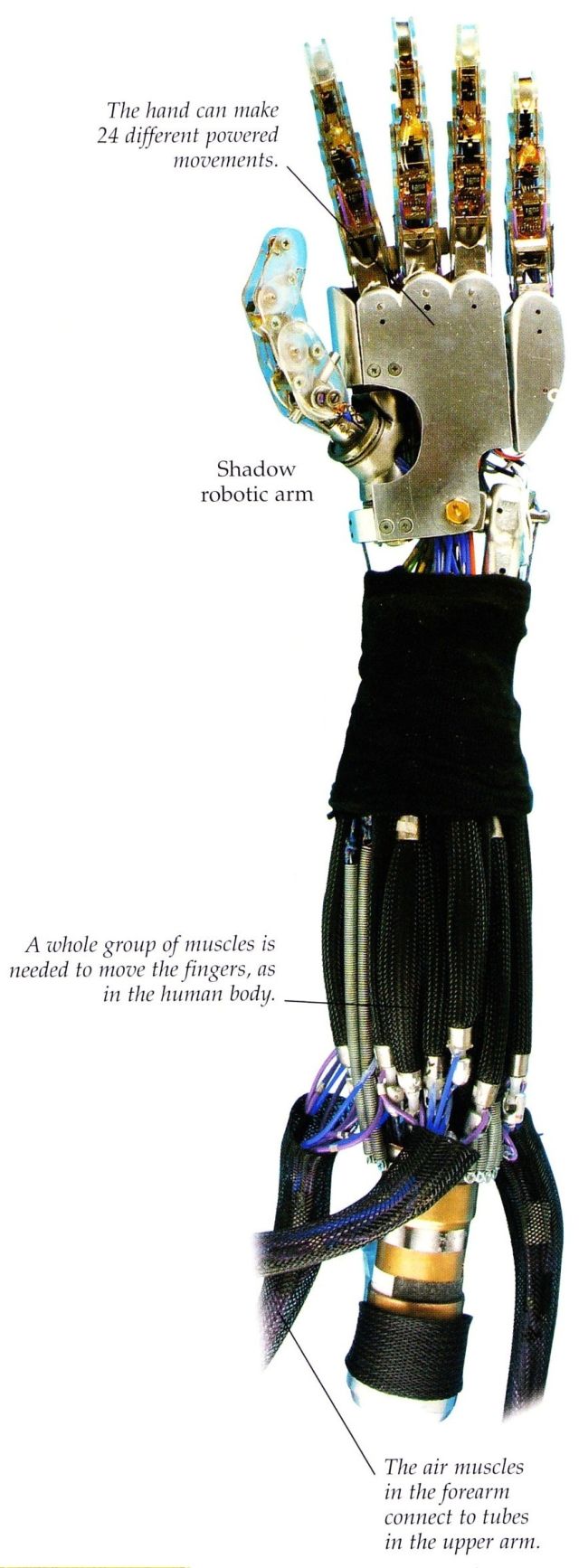
Shadow Hands
There are two types of hand built by Shadow.
The McKibben Shadow hand

The Electrically actuated Shadow hand.

Shadow C6M Smart Motor Hand
Electric conversion for Shadow Pneumatic Dextrous Hand. Summer 2008 by David Buckley.
For The Shadow Robot Company.
Mechanical design of the forearm and wrist for the conversion of the Shadow Pneumatic Dextrous Hand to use electric motors together with force sensing feedback to achieve active compliance. Debugging and reworking of existing motor control boards and force sensors for use with the new arm. The project also required learning and becoming skilled in ProDesktop, the CAD program Shadow use.
See David Buckley's website for further photos, video clip and other details.
An earlier Shadow KcKibben-actuated arm
See other Pneumatic, Fluidic, and Inflatable robots here.