From Robots and Telechirs – M.W. Thring 1983
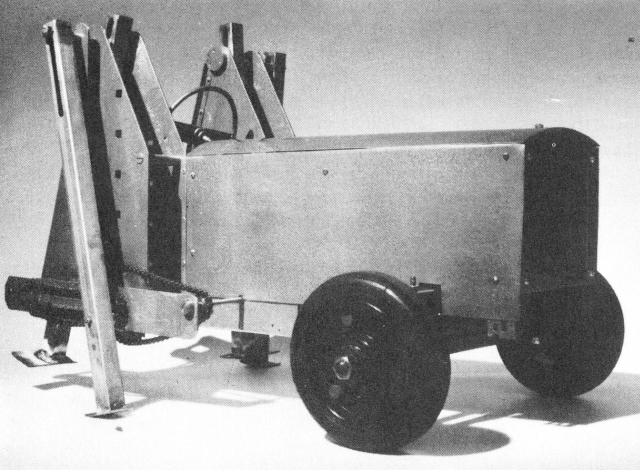
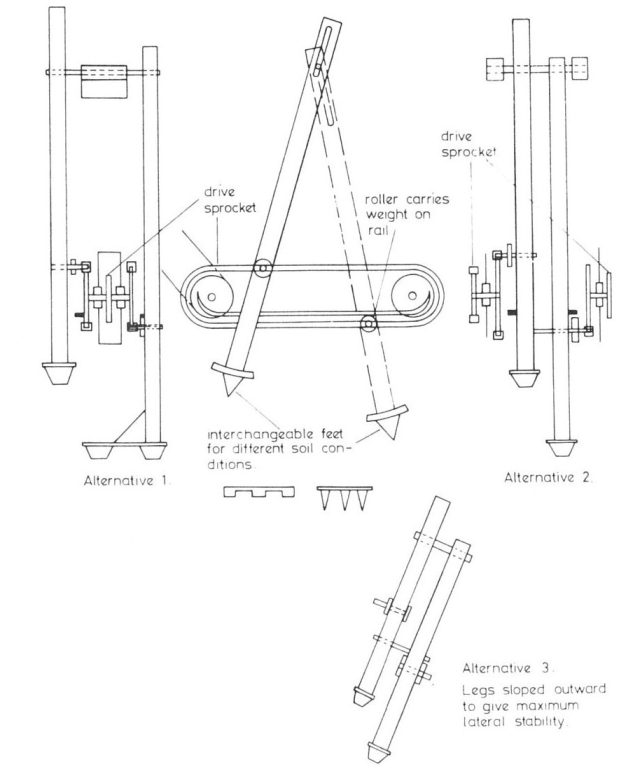
Thring has used the fact that the ideal foot movement is close to that of a link of a chain going around two sprockets to produce a very simple walking mechanism for a tractor. A small model is shown in above. There are two legs on each side and when the weight is transferred from one to the other that side drops by a distance equal to the radius of the sprockets. During the supporting movement the weight is carried on a rail via a roller on the axis of the link from the leg to the chain. Steering can be done by using wheels in front as in the model shown: in an application for low power cultivator for countries where energy is precious it could be used as a 'mechanical bullock' and steered by long handles. For a 'mechanical elephant' or high powered tractor it would have four pairs of legs and steer by varying the speed on the two sides.
The above text dates to 1983, but first known published reference is in 1982 here:
ENGINEERING FOR HUMANITY
by MW Thring – 1982 – Cited by 2 – Related articles
Professor M W THRING, ScD, FEng, FIMechE, FIEE, FlnstP, FlnstE, FRAeS ….. Walking tractor for use in underdeveloped countries …..
It is possible the Walking Tractor concept was developed much earlier as Thring was designing walking machines from at least the late 1960's.
*- Although born in Australia, Thring spent most of his life in Britain.