Biomechanical foundations of locomotion design (1978) by V S Gurfinkel, S V Fomin, Moscow Lomonosov State University
published in 1st CISM-IFToMM Symposium, Vol 1 p. 133
see p 160 Robots and Telechirs – Thring
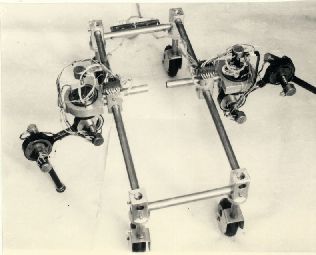
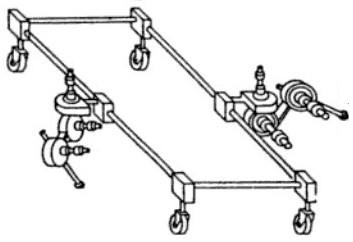
In a study of the biomechanical principles of construction artificial walking systems, Gurfinkel and Fomin used aq system consisting of a rectangular cart with castors on each corner and a spider-like leg on the centre of each of the long sides. Each leg has three rotary joints, one fixed to the castor with a vertical axis and two below it with horizontal axes. Each joint was powered with an electric motor. For straight walking, both legs were coordinated, but for steering all the elements could be controlled separately.
I have not accurately dated this walking machine. It may be earlier in the 1970's.