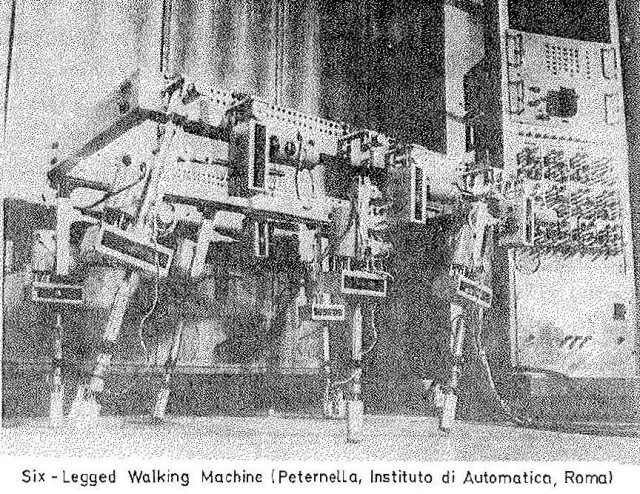
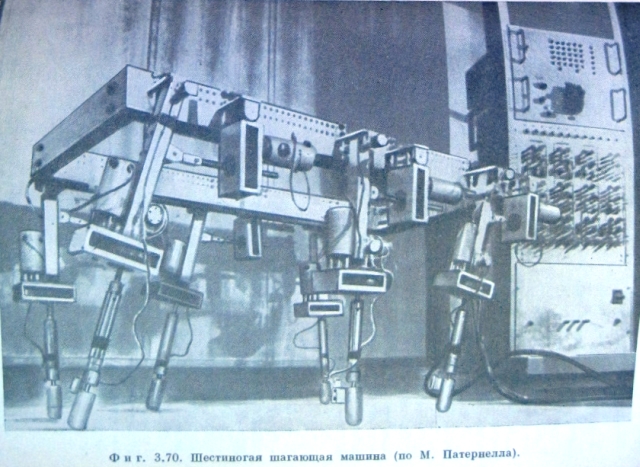
Six-legged Walking Machine by Petternella et al. (Instituto di Automatica, Roma, Italia)
Mocci, U., M. Petternella and S. Salinari (1973), "Experiments with six-legged walking machines with fixed gait"
Vukobratovich M. Shagayuschie roboty i antropomorfnye mehanizmy / M. Vukobratovich. – Moscow : Mir, 1976. – 544p.
M.Peternella (Rome, Institute of Automatics) with team of colleagues created the six-legged walking machine with electric drives. There is the interesting constructive decision for legs: hip joint was made in the form of hinge with lateral axis (single degree of freedom), and telescoping of shank is made in area of knee joint. Thus, motion of leg can be the same as one of articulated leg. This model of walking machine is able to do the straight-line movement only. The further improvement is planned.
Kozyrev Y.G. Promyshlennye roboty : Spravochnik / Y.G. Kozyrev. – [2nd edition] – Moscow : Mashinostroenie, 1988. – 392p.
The experimental electromechanical six-legged machine equipped by extremity, which have two degree of freedom – first is rotary (femoral joint), and second (knee joint) has the telescopic sliding structure.
Thanks to Vadym Shvachko in supplying the extra information.