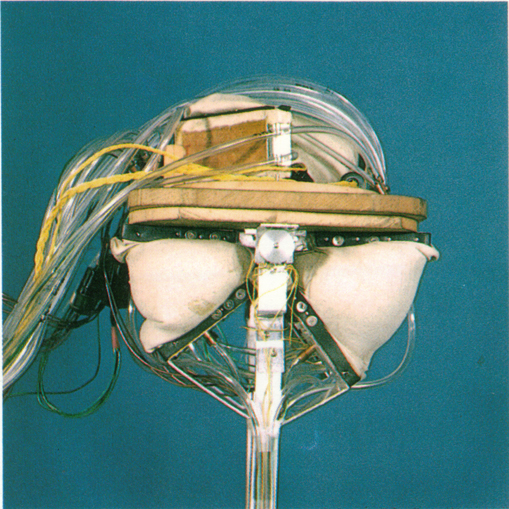
Pouch-Type Artificial Muscle (1970)
An artificial muscle, which would serve as a rotational actuator for prostheses, was developed. It was made of double boards connected by a hinge and an airtight rubber pouch the expansion of which was constrained by nylon so as to generate torque around the hinge.
Dr. Ichiro Kato, the leader of the first humanoid robotics research at Waseda and most celebrated roboticist in Japanese history. Kato’s background was in medicine – before devoting himself to creating a robot in the image of a human, his early studies focused on medical engineering. He was highly celebrated for his forward thinking. “The emphasis in my laboratory has always been on developing robotics with a target 20 to 30 years hence in mind,” writes Kato in a Waseda publication of the lab’s history.
Sometimes called “Professor Ochanomizu” in jest by his colleagues, many revered him as somewhat of an artist of the human form within the field of robotics. As a dean at the Waseda School of Science and Engineering and the Chairman of the Robotics Society of Japan, he made the university an epicenter of the field during the 1970’s. Beginning with the Waseda Bipedal Humanoid (WABIAN) Project in 1970, Kato described the efforts of his team as a work in “biomechatronics,” an interdisciplinary science aimed at replicating the organic functions of animals with machines. Yet, as Kato stated in a 1988 interview, “My research is not just in function, but in shape. In thirty years, in the twenty-first century, I think that human form will be essential in robots. In factories, which are for work, robots can be of any shape, but the personal robot…will have to exist in a regular human environment and be able to adjust to humans.”
[Above text sourced from here.]
 Ichiro Kato
Ichiro Kato
Humanoid construction at Waseda started from the ground up. The lab’s initial objective in the WABIAN Project was to engineer two viable lower limbs that would be able to support and convey the rest of a body by way of a natural, human-like system of bipedal locomotion. However, understanding and accurately replicating the exact mechanism of human mobility has proven an extremely delicate balance for researchers to find over the years. Perfecting a reproduction of this oddity of bipedal locomotion, widely referred to in the world of mechanical physics as “a series of controlled falls,” lies at the very foundation of the field of humanoid robotics.
In 1967, Kato and his team experiment with Rubber Artificial Muscles.
Artificial Muscle and Human Postural Stability
This study aimed to develop an artificial muscle which could be applied to artificial limbs. The technological fruits of this study were transferred to the studies of biped walking robots (WAP series) and above knee prostheses.
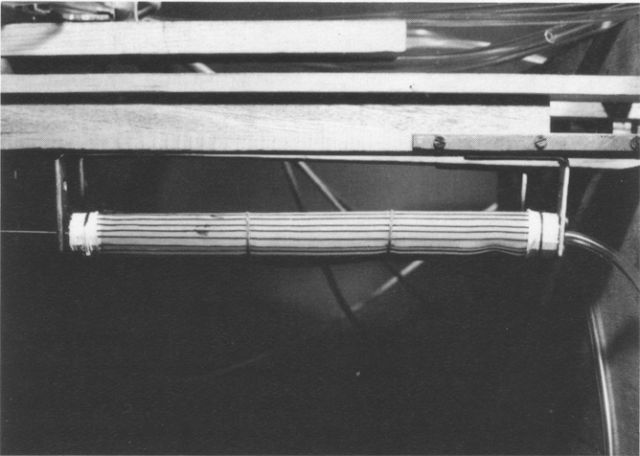
Before Injection of Compressed Air (1968)
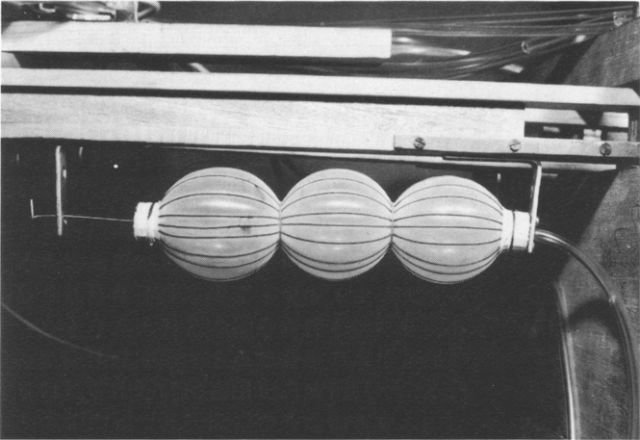
After Injection of Compressed Air (1968)
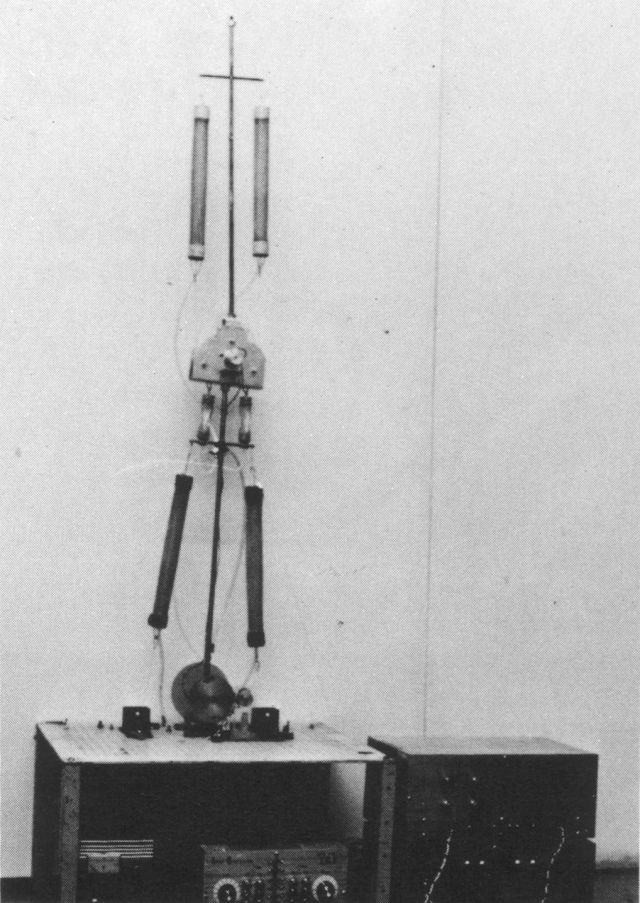
Model for Postural Control (1967~1968)
A biped-walking machine will be required to sustain its stability while standing and walking unassisted. Hence as a first step in developing a biped walking machine, a two-bar linked inverted pendulum was constructed and control strategies for holding its balance while standing were experiment any investigated.
In 1969, Kato and his team launched the “WAP” series, Waseda’s “anthropomorphic pneumatically-activated pedipulators.” These models, developed in yearly succession from 1969 to 1972, began to emulate human walking, each with an increasing degree of veracity.
Introduction of Artificial Muscle Made of Rubber: WAP-1 (1969)
The anthropomorphic pneumatically-activated pedipulator WAP-1 was developed. In it, artificial muscles made of rubber were attached as actuators. Planar biped locomotion was realized by teaching-playback control of its artificial muscles.
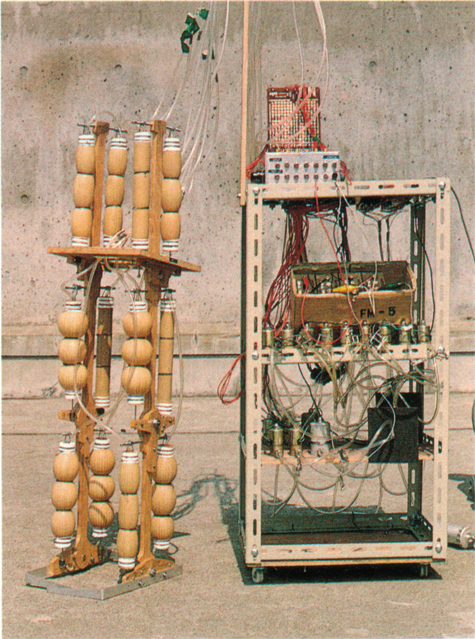
Waseda's WAP-1 Model
WAP-2 (1970)
Introduction of the Pouch-Type Artificial Muscle: WAP-2(1970)
In the second mode, the WAP-2, the powerful pouch-type artificial muscles were used as actuators. Automatic posture control was obtained by implanting pressure sensors under the soles.
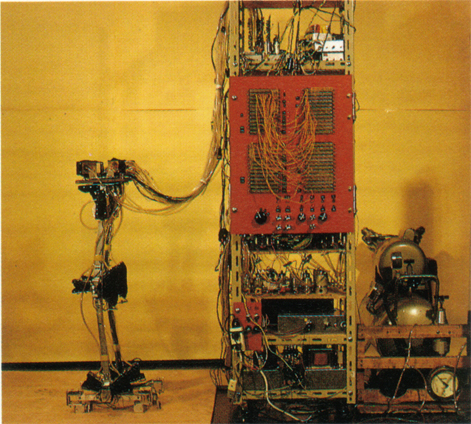
Waseda's WAP-2 Model
WAP-3 (1971)
Realization of Biped Walking by Light Weigh Model: WAP-3 (1971)
The WAP-3, a refined model of the WAP-2, was able to move its center of gravity on the frontal plane so that it was able to not only walk on a flat surface but also descend and ascend a staircase or slope and turn while walking. A controller based on memory directed the WAP-3, and its actuator was driven by PWM. The three-dimensional automatic biped walking realized by the WAP-3 was the first in the world.
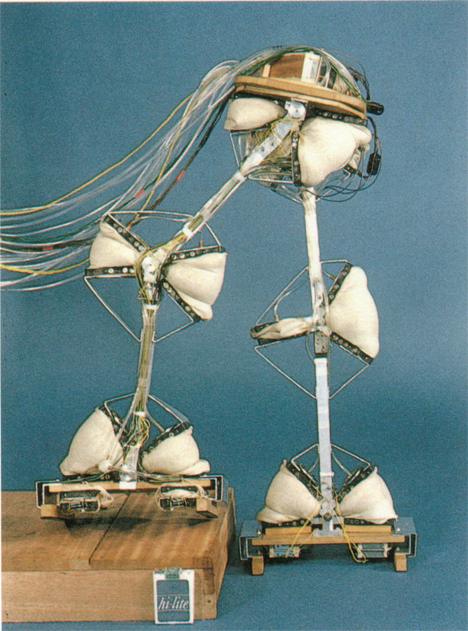
Waseda's WAP-3 Model
[Source: see here]