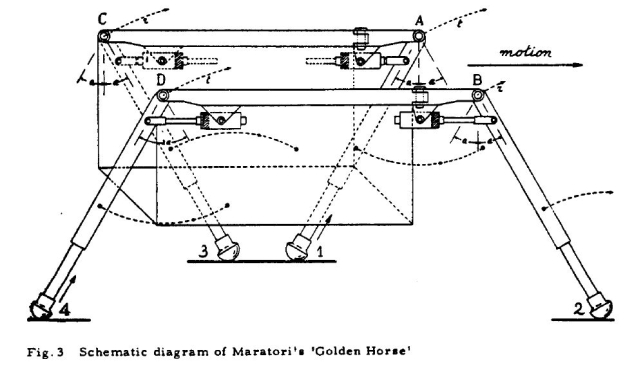
An entirely different approach by Spartaco Maratori(8) produced his 'Golden Horse' which, in the final analysis, is somewhat similar to Shigley's approach. Maratori based his concept on an analysis of the locomotion of the horse. He studied the way horses walk, trot, and gallop and after carefully cataloging the various leg motions, attempted to duplicate a horse with mechanical linkages, His concept appears in Figure 3: the source of the design is patently obvious. Maratori presented many refinements in his description of his concept but in almost all cases these refinements were to more closely duplicate the form of an animal's leg. Where this was not the intent, the refinements were aimed at an increase in stability through an increase in the number of legs.
Maratori calculated that his machine could achieve a speed of about six miles per hour with a trotting motion or 4.5 miles per hour with a walking motion. These speeds were for a machine about the size of a horse and his calculations did not consider the inertia forces. Since his treatment in the quoted reference was more or less descriptive, he may well have considered the inertia forces and found them acceptable.
Maratori discussed the advantages and disadvantages of his concept over both conventional vehicles and animals. When compared to 'beasts of burden' he concluded that: 'Some advantages are at the quadruped's side as for instance:— To have a brain and some judgement which helps him in choosing his way in finding a firm foothold.' In effect, Maratori's machine has the same problem as Professor Shigley's: how to control the machine, since Maratori's allusion to the animal brain and judgement implies the control process.
8. Maratori. S., " Project Chin Ma (Golden Horse)", Brochure published by the author, Piazza Cavour 4-3, Chiavari, Italy.
From R.A. Liston – "Walking Machine Studies" – U.S. Army. 1966.