1.0 INTRODUCTION
Teleoperator technology is presently being studied within NASA for on-orbit applications, including assembling of large structures, servicing and retrieval of satellites. The orbital teleoperator program is being conducted by MSFC and is designed to produce a suitable system for a series of Earth Orbital Teleoperator.
The orbital teleoperator system will include small dextrous servicing manipulators to be used in satellite servicing. The manipulator will perform tasks such as the removal and replacement of modules. Manipulator control and visual feedback will be carried out by remote data link with an operator located in the orbiter aft cabin or on the ground. The elements of a manipulator system therefore include the
. manipulator arm and end effector
. control system
. visual system
. operator
. signal transmission
3.0 MANIPULATOR SYSTEMS
The development of remote manipulator systems applicable to space missions is to be preceded by a series of comprehensive investigations into existing remote-manipulator technology, operator control, and management of remote manipulator systems and RMS requirements and applications in space missions.
NASA's RMS/EVA (Remote Manipulator Arm/ExtraVehicular Activity) committee has assigned to Marshall Space Flight Center (MSFC) the responsibility for earth orbital teleoperator technology development and integration, especially as it applies to free flying systems (FFTS) and manipulator systems mounted internally to spacecraft.
As part of its overall effort, MSFC developed the Teleoperator Technology Development Plan and in the implementation of this plan, established the Manipulator System Evaluation Program. MSFC's Electronics and Control Laboratory houses the Manipulator System Evaluation Laboratory (MSEL) which has been the focal point for gathering experimental derived data on existing manipulator Systems. The MSEL provides the necessary controlled environment for the study of each of the components of the manipulator system and the higher order interactions of the manipulator system components. As is the case in each of the major teleoperator subsystems. the evaluations of manipulator systems represent only part of a more extensive effort to adequately define the effects of system parameters, mission requirements, task conditions, human operator performance, and state-of-the-art factors which may impact remotely manned missions.
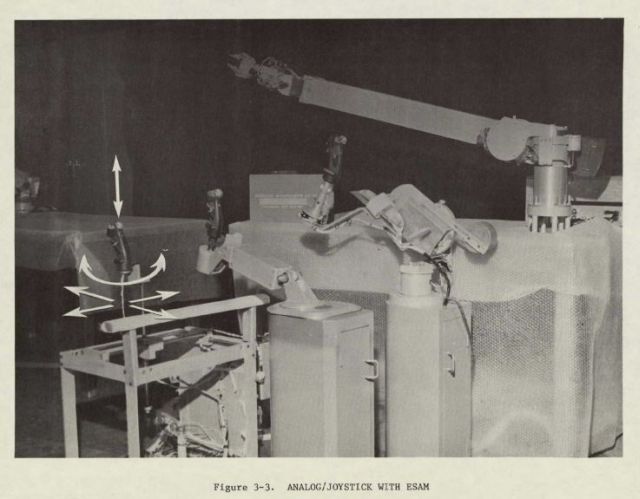
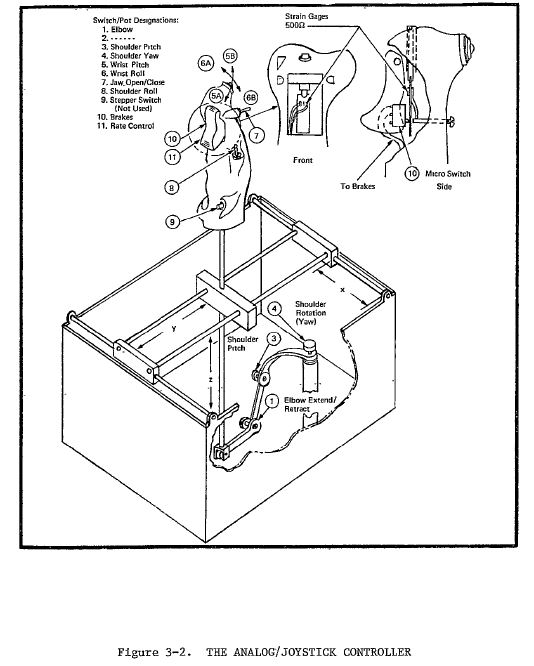
MSFC Extendable Stiff Arm Manipulator (ESAM) with Analog/Joystick controller
ESAM-ANALOG/JOYSTICK SYSTEM
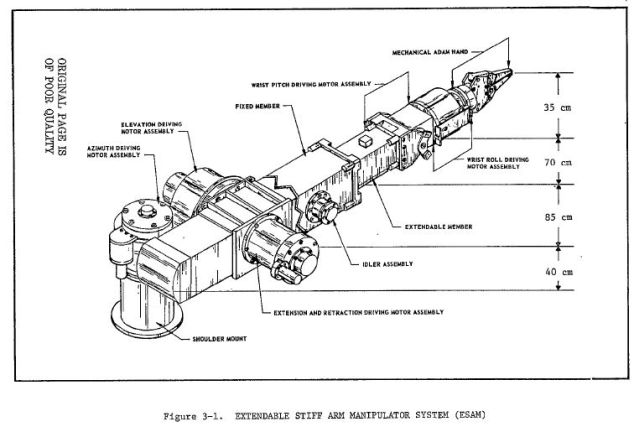
The ESAM is a non-anthropomorphic, five-degree-of-freedom manipulator representing the state-of-the-art achievement for general purpose remote manipulator units. The ESAM was designed and developed at the Marshall Space Flight Canter and evaluated at the Manipulator Laboratories of MSFC.
The ESAM, as depicted in Figure 3.1, is basically a tubular, fixed member having a square cross section which provides support and storage for an extendable stiff member. The extendable member has a wrist assembly which provides roil and pitch positioning to the end effector. The Manipulator Arm azimuth and elevation position motors and the extend/retract motor are mounted to the fixed member. Each ESAM joint is driven by a 28 VDC reversible motor through a planetary gear system to harmonic drive transmission.
….
ESAM operation entails azimuth/elevation at the shoulder joint. The entire outer and inner member and wrist assembly may be moved through an azimuth angle via 28 volt DC motor acting through a planetary gear system.
The elevation motor and drive assembly is inside the azimuth assembly.
The two joints and associated driving assemblies can move the fixed member in 660 degree envelopes in azimuth and 180 degrees in elevation.
The extendable member is a square cross sectional tube which telescopes within the fixed member. The extension is implemented by a 28 volt DC drive system. The extension range is 68 cm. (26.75 in.). The wrist pitch assembly at the end of the extendable member uses a 28 volt DC motor to drive the wrist 70 degrees in pitch. The final arm degree of freedom is wrist roll which has a range of 540 degrees and is driven by a 28 volt DC motor.
Source: excerpt from Earth Orbital Teleoperator Manipulator System Evaluation Program, 1975 by Essex Corp for NSAS contract # 30545
See other early Space Teleoperators here.
See other early Lunar and Space Robots here.