Thursday; 14 October 1971
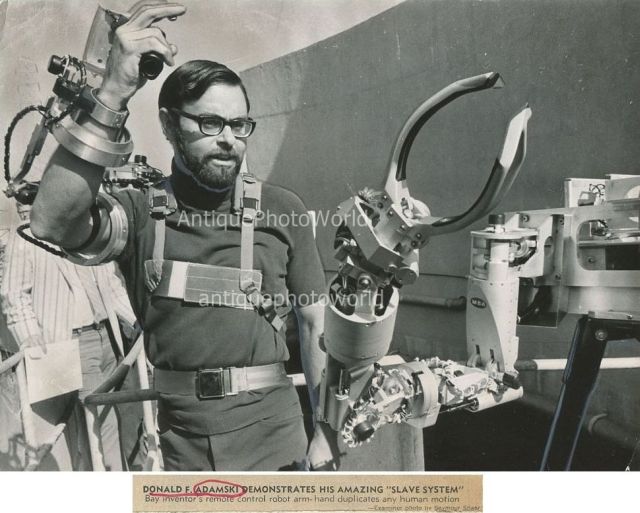
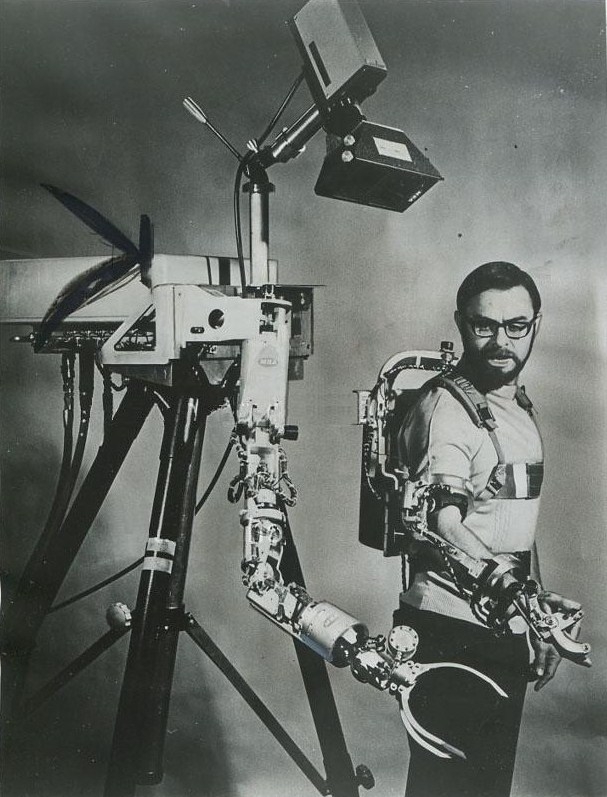
Naval Anthropomorphic Teleoperator (NAT) developed by MBAssociates, San Ramon, California, under a joint Navy-NASA-AEC contract. Slave arm and 3-D TV system mounted on Tripod. Exoskeleton master controller worn by operator (Donald F. Adamski) to the right in the photograph.
Naval Anthropomorphic Teleoperator (NAT)
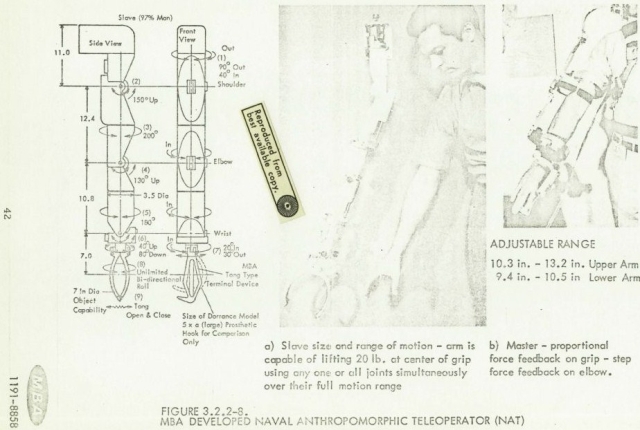
The kinematic arrangement is shown in Figure 3.2.2-7(c)[not shown] and the system is shown in more detail in Figure 3.2.2-8 above. It was developed by MBA over a nine month period under Navy funds administered by NASA/SNPO. It is an electro-mechanical-hydraulic-pneumatic hybrid 9 DOF man equivalent (dexterity, range of motion and strength) position servo controlled system incorporating proportional force feedback in the grip and step force feedback in the elbow. The master controller is a full motion exoskeleton. It was specifically designed for ordnance disposal and defuzing delicate submunitions. Contract design requirements included unusually smooth highly controlled dexterous action, the use of nonmagnetic materials, no radiated EMI, underwater operation, sandy beach and desert operation, high pantographic fidelity between master and slave, ruggedness and high reliability. Electric drives for this specific system were excluded on the basis of system reproduction cost, radiated EMI and magnetic materials. The exoskeleton is designed to readily fit 5 to 97 percentile men. It can be attached to a wall or chair.
The slave incorporates a semi-monocoque construction. As a consequence it is the first system capable of lifting more (20 lb. at any one joint) than it weighs (16 lb.). The grip is designed to accomplish extremely delicate and minute operations as well as handle spheres, cones and cylinders up to 7 inches in diameter and weighing up to 20 lb. The system further incorporates a design which readily allows the addition of a remote quick release for the claws and easy conversion to a reversible electric motor driven system (DC torque, gear reduction and ball screw actuator). Its kinematic arrangement (Figure 3.2.2-7(c) duplicates that of the human arm, except for the continuous grip roll beyond the wrist gimbal. Specifically designed for low cost in production WOK in quantities of 40 or more) using off-the-shelf commercially available components (where possible), the system has already established a new state-of-the-art in servo controlled teleoperator systems.
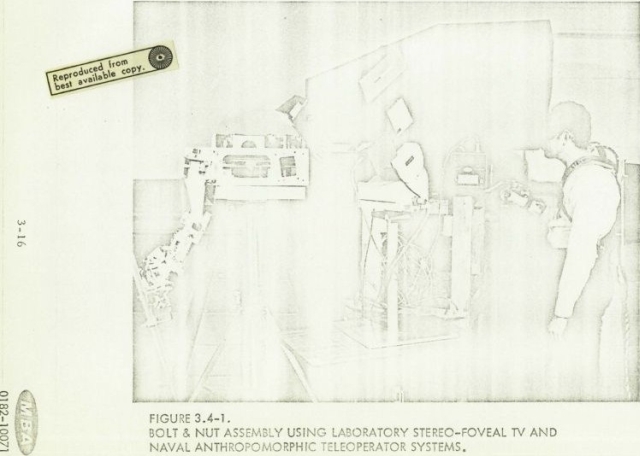
An interim performance demonstration was made for NASA, Navy, AEC and MIT personnel on 22 July 1971. Performance of the arm in grasping and lifting large 20 lb. test objects as well as threading a small household needle, handling raw eggs, removing and replacing nuts from bolts and replacing small electronic components from printed circuit boards, has earned the ARM the reputation of being the most advanced teleoperator system developed to date. The above tasks were done while viewing through a stereo TV system. The needle threading, trimpot adjustment and operational amplifier tasks could not be accomplished without the TV system stereo attachment.
Total system tests of the right arm were successfully accomplished in October 1971. These tests included sea water immersed operation at a depth of ~8m (25'), operation from -18°C (0°F) and 59°C (120° F), operation in sand storms. The dexterous tasks described above were repeated and more recently unlocking a padlock, removal and disarming a mock homemade bomb and defusing a buried (inert) standard mine were accomplished.
MBA used NAT in evaluation of teleoperator systems for NASA's then proposed Space Shuttle robotic arm.