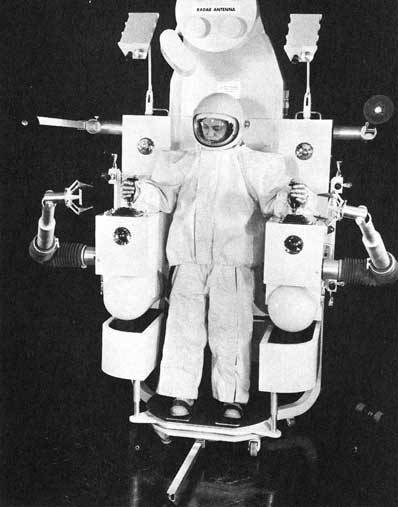
SPACE WORK PLATFORM
A self-propelled space work platform for astronauts based aboard a "mother spaceship" has been designed by the Bendix Corporation's Missile Systems division in Mishawaka, Ind.
A full-scale mock-up of the space vehicle, prepared under a $40.000 contract from the Applied Physics Laboratory of Johns Hopkins University, which was responsible for the basic concepts, is now being studied by officials of the National Aeronautics and Space Administration in Washington.
The EVA (Extra-Vehicular Activity) work platform is designed to help spacemen perform a variety of missions such as inspecting and maintaining orbiting objects, rescuing marooned astronauts, assembling structures in space and transferring objects from one orbit to another or one spacecraft to another.
The Bendix EVA is a one-man open platform that allows an astronaut to maneuver through space, anchor the vehicle to other objects in space and perform various tasks with two electrically powered mechanical "hands." It can range a maximum of three nautical miles from the mother ship and carries sufficient oxygen to sustain the astronaut for eight hours.
Source: Hobbs Daily News, Wed Oct 4, 1967.
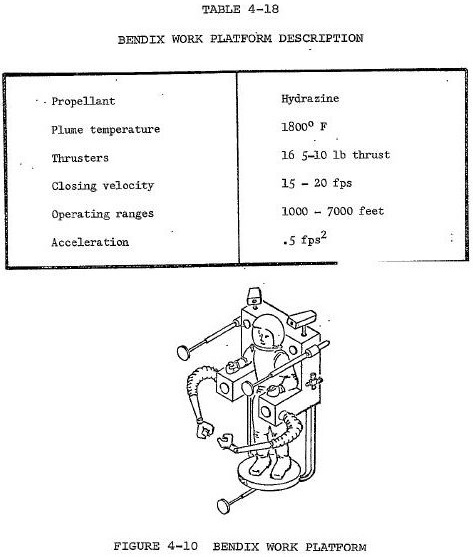
Modules available to the platform include the long range rendezvous module, the extended propulsion capability module, and the payload module. The long range rendezvous module is required for missions requiring excursions in excess of 10,000 feet. The module provides radar parameters of azimuth, elevation, range, and range-rate for computer-controlled rendezvous. Radar maximum range is 250 miles. The extended propulsion capability module provides an increase in available delta velocity from 300 to 1085 fps. The delta velocity for the full-up platform is 975 fps. The payload module mounted on the floor of the platform provides storage for tools, spare parts, rescue equipment, repair kits, test equipment, and special work aids.
Stabilization is provided by automatic attitude control.
All commands initiated by controller (attitude or translational) actuation result in full-on thruster firing. No proportional rate command is provided.
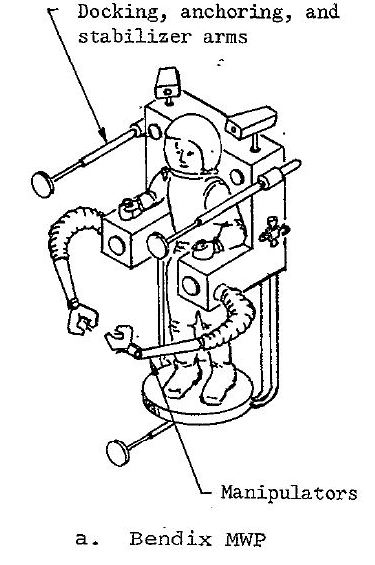
The platform is capable of serving as a portable worksite and can be fitted with manipulator arms to increase the reach and maintain and amplify forces provided by the astronaut. Worksite anchors are provided to connect the platform to structures. These consist of adhesive pads at the ends of three rods extending forward from the platform. The pads contain electrically heated epoxy adhesives and are left on the surface at undocking.
Bendix Corporation Module EVA Work Platform
This system proposed by Bendix and described in Section 4.4 is a configuration for an EVA work platform to be used by a suited astronaut in an orbital operation. The design consists of an assembly of five modules which are removable and interchangeable. As proposed, the astronaut conducts most of his activity from the platform; if he were equipped with a portable life support system, he could leave the platform if he desired. The platform could perform for a period of about 4 hours normally (extended to 8 hours with supplemental life support) (see Figure 5-17a).
The platform incorporates two bilateral (master-slave) manipulators. These manipulators are capable of magnifying or locking forces and extending the astronaut's reach. The manipulators have the following characteristics:
– Electrically driven
– Force amplification ratio: 2:1
– Maximum forces at slave: 25 pounds
– Working volume at master: 1 cubic foot
– Working volume at slave: approximately 525 cubic feet (5 foot radius)
See other early Teleoperators here.
See other early Lunar and Space Robots here.