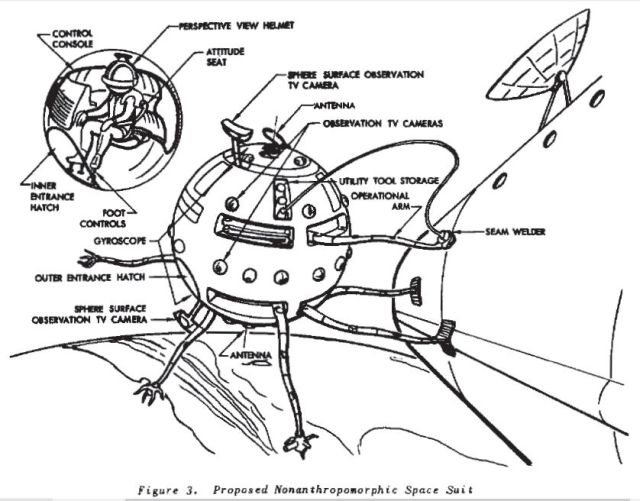
For Douglas Aircraft, in 1962, their earlier space manipulator designs, i.e., the Project Mercury converted capsule and the "Humpty Dumpty" unit, can be considered as first-generation, feasible, nonanthropomorphic devices. A much more speculative concept, but in every sense within our technological reach, is shown in figure 3 above. This is basically a space tug and repair vehicle and is spheroidally shaped. Viewing this figure, we see:
a. The control console will release doors on mechanical arms and legs, select various extensions, select self-viewing TV cameras, select receivers (communications), and regulate gyro control.
b. The 3-D helmet is a contained electronic unit and inside is a dot-type screen instead of the usual cathrode-ray tube. The image surface is hemispheroidal to reproduce real optical effects. The hemisphere would fit on the face over each eye to achieve stereoscopic effects. As the observer rotates his head he picks up the next camera transmission – not as a separate picture but as a continuously integrated picture. In actual use, the helmet could be reduced to a much smaller head set.
c. Expanding arms use servomotors with variable current control. They are run by operational gloves.
d. When the operator is positioned in the attitude seat, he has a complete attitude control of the sphere as he has of his own body.
e. Television cameras are placed on the main periphery of the globe.
f. Jet stabilizers are located between the cameras.
Source: "Survey of Remote Handling in Space", D. Frederick Baker, USAF, 1962
See other early Teleoperators here.
See other early Lunar and Space Robots here.