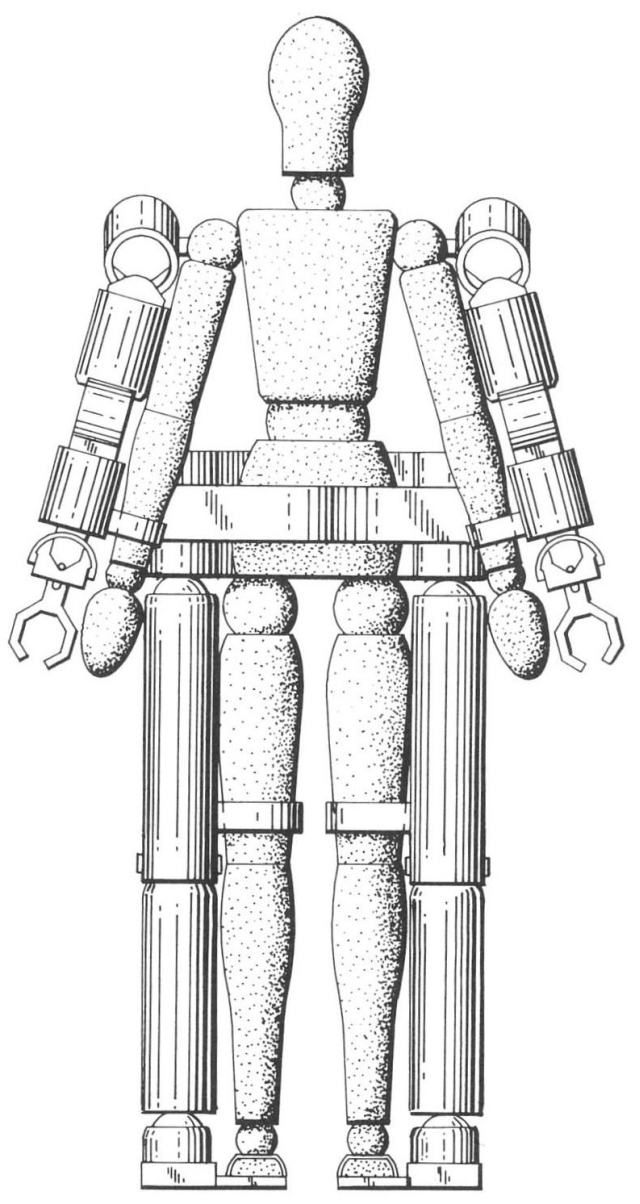

The Man-Amplifier
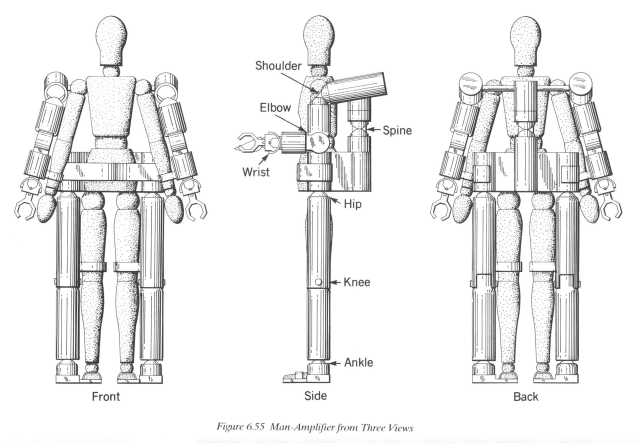
The figure above shows a model of the Man-Amplifier proposed by Ross-Hime Designs. It has twenty-six degrees-of-freedom, excluding the hands. A 500 Lbs load capacity is engineered. The modular building block approach applied to the arm and leg actuators simplifies maintenance and reduces parts inventory. Singularity free, pitch-yaw type joints are utilized in legs and arms, an improvement over the simple pivot joints used in the past. The legs have two degrees-of-freedom hips, one degree-of-freedom knees, and two degrees-of-freedom ankle joints. Unique, patented, hydrostatically lubricated ball-and-socket joints powered by ball-screws are used. This design is described in detail in Chapter 5. All joints are powered by electrically driven ball-screw actuators, with the exception of the shoulder and wrist roll axes.
The legs couple to a cross member which supports a three degrees-of-freedom spine. The spine gives the human operator's trunk freedom of motion. The spine joint consists of Rosheim's shoulder joint scaled to carry the load of the arms. Consequently it must be more powerful than the shoulder actuators and counterbalanced. Counterbalancing, the negation of the system's own weight, is achieved electronically aided by the self-braking nonbackdriveable nature of the joints. A tubular cross member attached at the top of the spine supports the arms. The arms each have seven degrees-of-freedom; the sum of three degrees-of-freedom shoulder joints, one degree-of-freedom elbows, and three degrees-of-freedom wrists. Both the leg and arm joints are hollow, which permits internal routing of power and position sensing wiring. This is an important feature, as it prevents entanglement and abrasion of the wiring which could cause increased failures and downtime, not to mention endangering the operator. In "suiting-up," the operator steps backward into the Man-Amplifier and is harnessed to the system via breakaway cuffs located at various lever points on the limbs. A major advantage of the Man-Amplifier is simplified control because the operator is part of the servo loop. As he or she moves, the pressure sensitive cuffs feed a signal to the actuator motors which cause actuator motion.
In contrast to Hardiman, the Man-Amplifier's joint kinematics closely resemble those of the operator. This makes the system inherently User-friendly. The operator does not have to plan for or fight against singularities that might restrict or hurt him. Stability is also improved over past designs, especially in the ankle and hip joints.
Mechanical joint limits are incorporated in the design that prevent harm to the operator and machine. This is particularly important because the numerous degrees-of-freedom and resultant flexibility could force the operator into odd compound joint positions which may conflict with the limits of human joints. Human powered roll rotation might be possible through bearings at various joints such as the ankle. In this case the bearings would take the load, as the minimal rotational loads at such points may well be within the operator's ability to control.
Power for the Man-Amplifier could come from batteries, an umbilical cord, or, as has been proposed with the Los Alamos "Pitman," high efficiency fuel cells. A hydromechanical control system seems logical for simplicity and reliability, but was found to be too cumbersome and inefficient for a mobile device. General Electric has already developed this control system and found it wanting (Mosher 1967, 1971).
Emergency rescue applications include delicate removal of debris from victims entrapped by concrete girders, fallen walls, train wrecks and other man made or natural disasters. The military could find application with clearing shipboard disasters resulting from bombing or missile strikes, aircraft carrier deck fighter plane crashes, etc. Conventional equipment, such as cranes and bulldozers, lack dexterity and sophistication and often endanger the entrapped victims that are being saved. The Man-Amplifier, by virtue of the operator's intimate relationship with the machine, gives great sensitivity to the tasks of disentombing victims from debris. A transference of man-amplifier technology could benefit the physically handicapped population. The partially paralyzed or amputees could regain the ability to walk (Morecki 1984). A full quadriplegic could regain functionality with the appropriate sensor interface. Less exotic uses include manufacturing material management, in which a single operator/man-amplifier team could replace several forklifts.
The advantage of the Man-Amplifier is that it can do the work of many men. It would allow the armed forces to reduce the number of material handling personnel and thereby cut their combat support personnel ratio. Sites where it would be most useful in the near future would be in fortified situations for loading artillery shells and moving supplies or loading cargoes and moving computers when in port. Once its use in support areas is demonstrated, the logical step will be to develop a fast moving fighting machine for rugged terrain. Military applications are wide ranging, and include the augmentation of elite fighting corps (Shaker 1988). Units would be costly, requiring critical applications in which cost is not a factor. As forty percent of the Earth's surface cannot be transversed by wheeled vehicles, the Man-Amplifier's ability to lift and carry heavy equipment such as machine guns, mortars, and ammunition through rugged terrain inaccessible to wheeled vehicles would enable the transport of material on special operations. Construction of emergency shelters and other structures, such as bridges, are other obvious applications for the Man-Amplifier.
Rosheim, M. 1989a. "Man-Amplifying Exoskeleton. Pages 402-411. Wolfe, W. and Chun, W. Chairs/Editors. 1989. "Mobile Robots IV." Proceedings of SPIE – The International Society for Optical Engineering. Vol. 1195. Philadelphia, Pennsylvania. 6-7 November 1989.