Autonomous Mobile Robot (MAR-1) [Мобильный автономный робот (ÐœÐÐ -1)] was created by the Division of agricultural robotics at the Moscow Institute of Agricultural Engineers in the early 1980s in the Soviet Union.
English text and some images sourced from Vadym Shvachko's Robotic blog here.
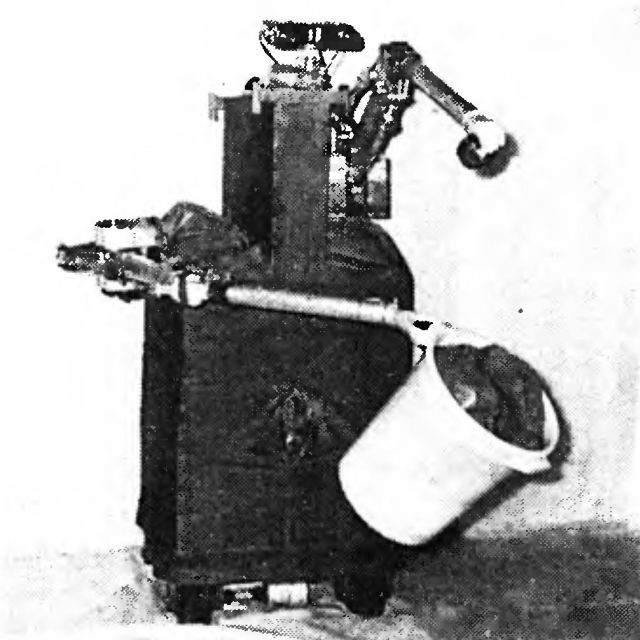
The first model of MAR-1.
Image source – Юный техник 1982-11, Ñтраница 16
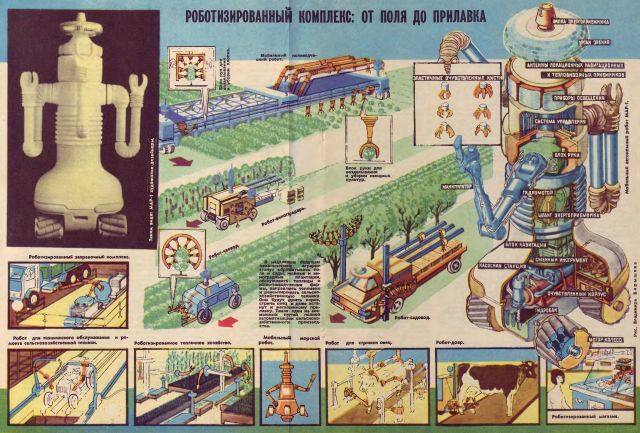
The first model of MAP-1 was designed to serve the livestock complex. The robot was made so that it can use existing walkways on farms (calculated per person), modern equipment and tools.
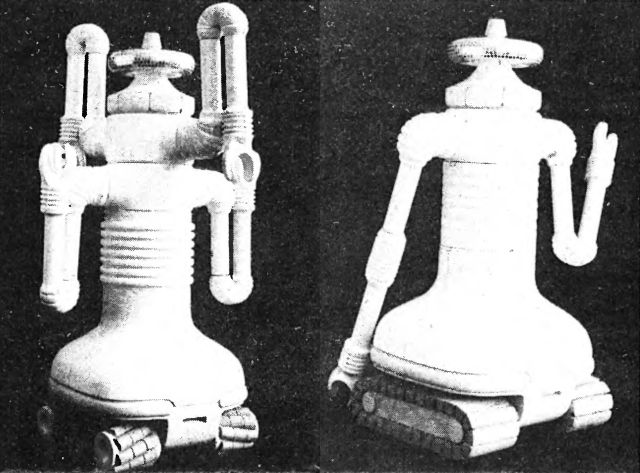
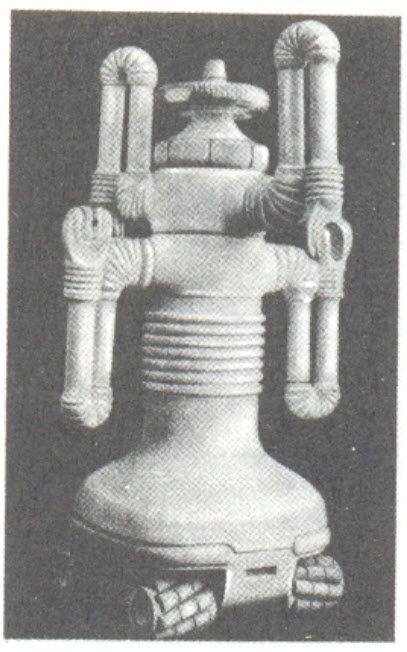
Wheeled and tracked models MAR-1.
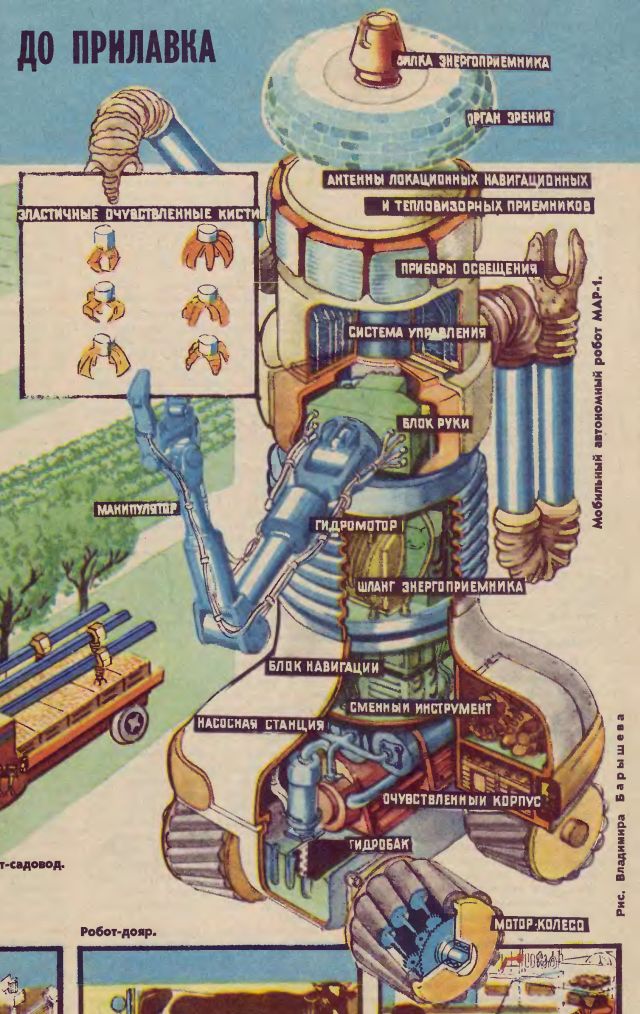
The height of the robot – 1850 millimeters, the area of ​​the base – a third of a square meter. He has a pair of hands that have eight degrees of freedom. Machine body rotates in either direction around a vertical axis. This further increases the possibility of "hands." Hydraulic "muscles" of each hand, lift up to 75 pounds of cargo. Tactile transducers allow fingers to register or impact compression force in the range of 0.0294 g to 112.7 kg, the temperature is from 0.4 to 180 º C and humidity of 3 to 99 percent. MAR-1 is made prefabricated (detachable hand, aggregated oil-hydraulic, power, navigation and locating subsystem).


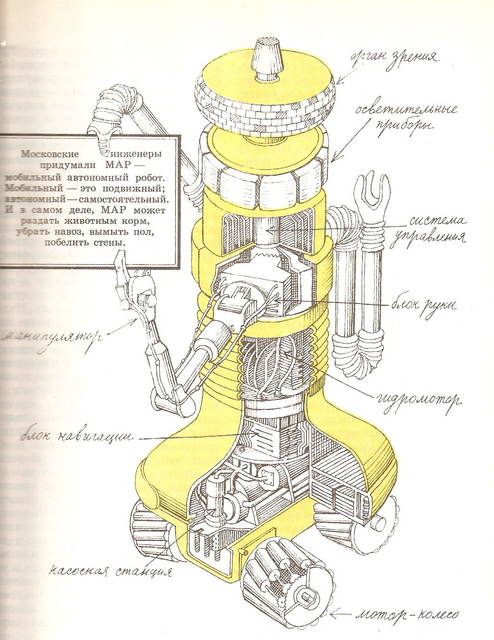
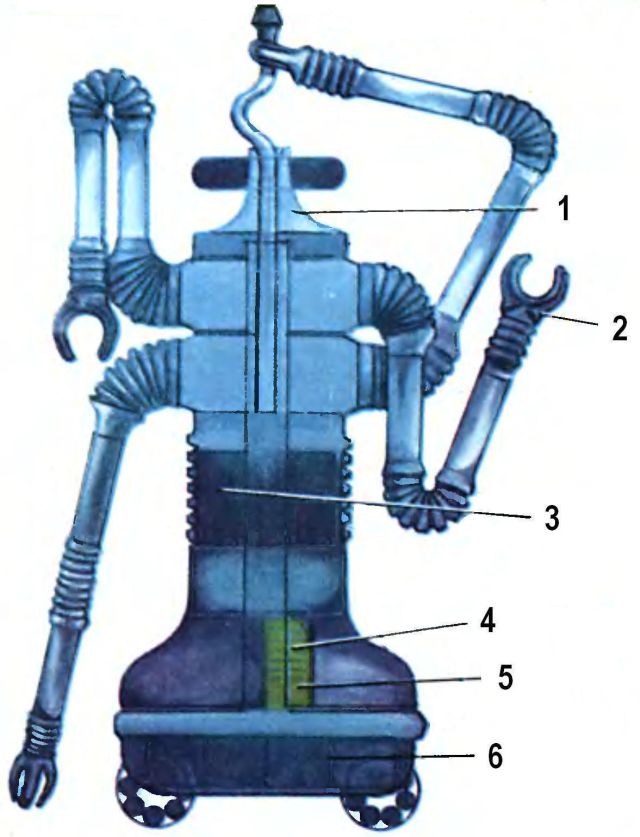
The scheme MAR-1
1 – Power Touch sensitization, 2 – Block hand-grips;
3 – Automatic control unit and communication, 4 – hydraulic power unit;
5 – The navigation block, 6 – Power supply unit.
The internal clock is fed MAR-1 team to start work. In memory of automatic operator contain information about the livestock complex technological environment, all of the aisles, entrances and exits, production sites. There is also a sub-system, which will not allow the robot to stay on track. Arriving at the workplace, MAP-1 itself is connected to the power supply, communication lines, control panel or computer. During operation, the device automatically controls the state of the environment (humidity, fumes) and animals (temperature, thickness of subcutaneous fat).
see pdf here
An interesting detail: the wheeled version of the robot obviously uses omni directional mecanum wheels. They were invented by Bengt Ilon in 1973, the US Navy bought the patent from Ilon in the 1980s.