Thring, at Queen Mary College built a fire-fighting robot in 1962. This robot navigated its way round a "track" using signals from a gyro compass and measuring distance by wheel-rotation. It left the track when it "saw" a fire and extinguished the fire when its "finger" sensed the flame. The idea was to develop a fully automatic night watchman that could travel around a warehouse and look out for a fire. [Source: New Scientist 19 Nov 1981]
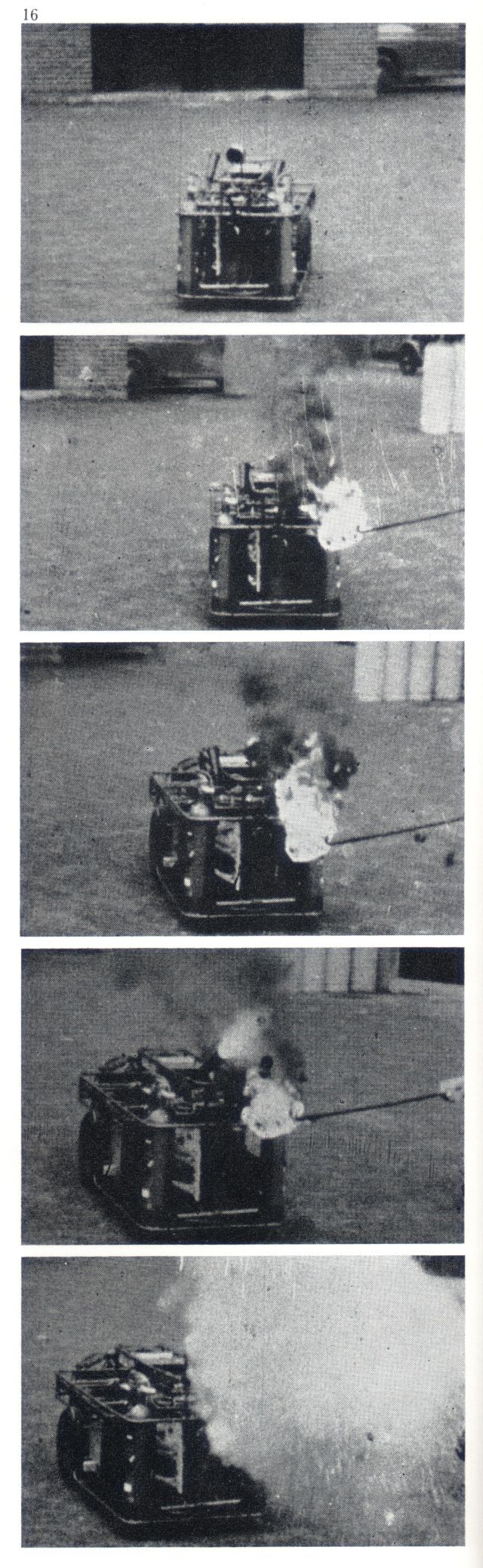
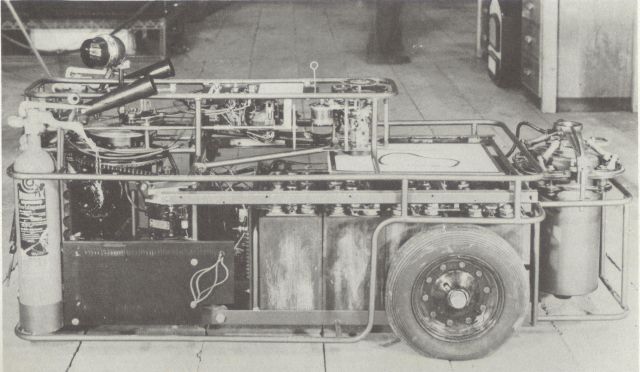
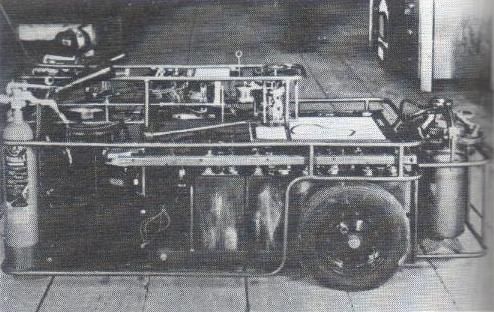
A demonstration robot firefighter built in 1962. It followed a track plotted on the table, detecting the track by photocells, and determining its direction by the gyro compass at the back. The distance travelled was determined by counting the revolutions of the back wheels and the drive and steering were by the front wheel which could be rotated by ± 90° from straight. An arm sticking out in front carried a bimetallic switch and there was a photocell detector on a headlight fixed to the front wheel carriage. This carriage oscillated during the steering process and if the photocell caught sight of a flame the robot left its track, homed on the flame, and when the bimetallic switch detected the heat of the flame the robot stopped and brought the fire extinguisher nozzles onto the flame. This first prototype was liable to chase the sun! [Source: Thring – Robots and Telechirs]
In the above image, you can see a drawing of a closed-loop. This represented the route the cart was to follow. It is essentially a line-following robot. The route was ignored once a fire was detected.
VIDEO CLIP
Log into or create free account to British Movietone News.
Enter 83414 in Search Story – press Search, then play clip.
Most references date this robot at 1962, but the film clip is dated December 1961.