VADIM MATSKEVICH
Entertaining ANATOMY OF ROBOTS
Published by the Radio and Communication ", 1988
CYBERNETIC TOY program-controlled
Fig. 82 depicts a funny puppy who goes merrily wagging his tail, barks, turning his head left and right, stopping, looking around, and then again with the barking continues to move. He constructed a young technician Muscovite Myasum Alyautdinov. The electronic block model is a software unit of the three timers. One switch connects power to the other two for some time (a minute), after which the model stops. Two software periodically relays stop model, including the device barking, or turn it into a movement. To get a long delay in eksiodnymi capacitors of small capacity, both timers are collected on operational amplifiers.
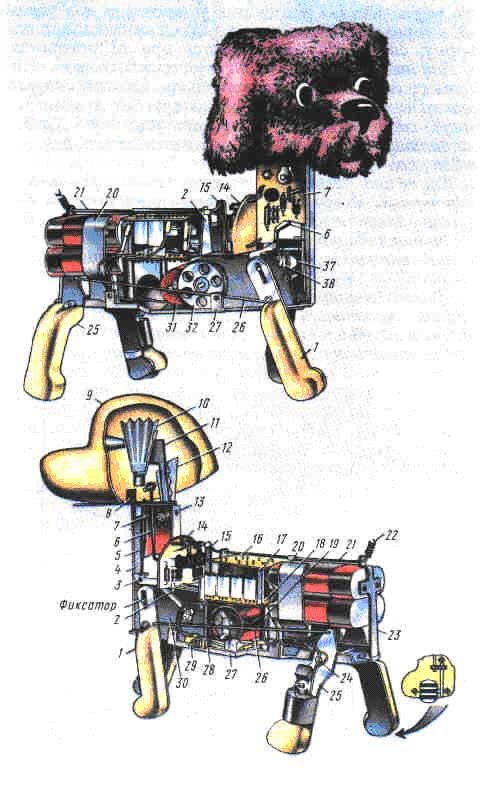
Figure 82 Cyber Dog
When rotating the pinion 44 clockwise "floating" gear 39 moves up and engages the gear 35 through an intermediate gear 34. Gear 35 rotates with the crank shaft 36, and the movement is transmitted through traction 6 head 9. This opens the mouth and at the same time under tension compressed spring device 33 simulates barking. The sounding device is a mechanical beeper. So, the dog barks, wags his tail, turns his head in different directions.
Complex mechanical part of the toy. It consists of a device that converts with the help of a crank mechanism and the intermediate levers and rods rotational movement of the electric motor in the reciprocating motion of the head, feet and tail. Required torque on the shafts, on which the gear mechanism provides a reversible multistage gearbox. To change the direction of rotation of the output shaft enough to change the polarity of the electric power source.
Graphic representation of the mechanical toy gives its kinematic diagram (see Fig. 83).
When rotating the gear 44 counterclockwise "floating" gear 39 moves downward, engages with the pinion 38, which, in turn, transmits motion to the crankshaft 37. This tree, the ball – nirno connected with the front legs 1, forcing them to touch the floor, simulating walking. Hind feet 25 move through the hinge joint with the front through the draft 26. During the walk moves the tail 21 and turns his head 9.
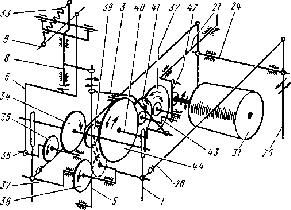
Figure 83 Kinematic scheme
Traction tail 21 moves the gear 41, crank 43 and rod 42, and thrust 5 goals – lever 3, attached to the shaft gear 44. Bearing element of design is the chassis 27 (see Fig. 82), is running gear 30, motor 31 and all other details. They closed casing. The chassis and most of the details of the mechanism are made of sheet steel 0,8 mm thick. By the chassis along the ribs in place bend soldered pad. Tyagi, 6 and 26 are made of steel wire with diameter 1,5 and 2,5 mm, respectively. At the ends of all rods drilled holes into which are inserted wire splint. Most of the details of the construction is fixed with screws M2.
Reducer – homemade, made of gears from old toys. Driven pinion gear 32 coupled with motor gear diameter of 7 mm, fitted on its shaft. Sides gear made of sheet steel thickness of 1 mm. They are fastened with three screws M2, 5. At the screws between the plates wear a metal sleeve with the outer diameter of 4.5 mm and a length of 15 mm. Cranks worn on the walls, made of brass (or duralumin).
3336 battery supplying the electric motor, attach to the chassis by two straps 20 (see Fig. 82), and circuit boards 16, 18 of the decoder – in plastic racks 17 and 19. In toy used motor DI1 – 3 14MO 390 001 TU. Compared with other similar engines, it has a high capacity, high efficiency, low acoustic noise and interference.
Beeper 10 is made of cardboard and tracing paper papered. Within the fixed spacing of the spring steel wire with a diameter of 0,5 mm. Sound publishes a metal plate with thickness of about 0.08 mm, vibrating under the action of the jet air entering the cavity Tweeters. Attach it to the rack 11, soldered to the bottom of the head. The head 9 and the casing – a papier-mache (trim cotton soaked casein glue).
Mechanical part of the complex in the manufacture of toys. But the difficulties of its manufacture offset joy that you get from communicating with this fun toy.
Ð’ÐДИМ ÐœÐЦКЕВИЧ
ЗÐÐИМÐТЕЛЬÐÐЯ ÐÐÐТОМИЯ РОБОТОВ
ИздательÑтво «Ð адио и ÑвÑзь», 1988
КИБЕРÐЕТИЧЕСКÐЯ ИГРУШКРС ПРОГРÐММÐЫМ УПРÐВЛЕÐИЕМ
Ðа риÑ. 82 изображен забавный щенок, который ходит, веÑело вилÑÑ Ñ…Ð²Ð¾Ñтом, лает, Ð¿Ð¾Ð²Ð¾Ñ€Ð°Ñ‡Ð¸Ð²Ð°Ñ Ð³Ð¾Ð»Ð¾Ð²Ñƒ направо и налево, оÑтанавливаетÑÑ, озираÑÑÑŒ по Ñторонам, и затем Ñнова Ñ Ð»Ð°ÐµÐ¼ продолжает движение. Его ÑконÑтруировал юный техник моÑквич ÐœÑÑум ÐлÑутдинов. Ðлектронный блок модели предÑтавлÑет Ñобой программное уÑтройÑтво из трех реле времени. Одно реле подключает питание к двум другим на определенное Ð²Ñ€ÐµÐ¼Ñ (около минуты), поÑле чего модель оÑтанавливаетÑÑ. Два программных реле периодичеÑки оÑтанавливают модель, Ð²ÐºÐ»ÑŽÑ‡Ð°Ñ ÑƒÑтройÑтво лаÑ, или переводÑÑ‚ его в режим движениÑ. Чтобы получить длительные задержки Ñ ÑкÑиодными конденÑаторами небольшой емкоÑти, оба реле времени Ñобраны на операционных уÑилителÑÑ….
Ð Ð¸Ñ 82 КибернетичеÑÐºÐ°Ñ Ñобака
При вращении шеÑтерни 44 по чаÑовой Ñтрелке «Ð¿Ð»Ð°Ð²Ð°ÑŽÑ‰Ð°Ñ» шеÑÑ‚ÐµÑ€Ð½Ñ 39 перемещаетÑÑ Ð²Ð²ÐµÑ€Ñ… и зацеплÑетÑÑ ÑˆÐµÑтерней 35 через промежуточную шеÑтерню 34. ШеÑÑ‚ÐµÑ€Ð½Ñ 35 вращает вал Ñ ÐºÑ€Ð¸Ð²Ð¾ÑˆÐ¸Ð¿Ð¾Ð¼ 36, и движение через Ñ‚Ñгу 6 передаетÑÑ Ð³Ð¾Ð»Ð¾Ð²Ðµ 9. При Ñтом раÑкрываетÑÑ Ð¿Ð°ÑÑ‚ÑŒ и одновременно при раÑÑ‚Ñжении Ñжатой пружины 33 уÑтройÑтво имитирует лай. Звучащим уÑтройÑтвом Ñлужит механичеÑÐºÐ°Ñ Ð¿Ð¸Ñ‰Ð°Ð»ÐºÐ°. Итак, Ñобака лает, вилÑет хвоÑтом, поворачивает в разные Ñтороны голову.
Сложнее механичеÑÐºÐ°Ñ Ñ‡Ð°ÑÑ‚ÑŒ игрушки. Она ÑоÑтоит из уÑтройÑтва, преобразующего Ñ Ð¿Ð¾Ð¼Ð¾Ñ‰ÑŒÑŽ кривошипно-шатунного механизма и промежуточных рычагов и Ñ‚Ñг вращательное движение ÑÐ»ÐµÐºÑ‚Ñ€Ð¾Ð´Ð²Ð¸Ð³Ð°Ñ‚ÐµÐ»Ñ Ð² возвратно-поÑтупательные Ð´Ð²Ð¸Ð¶ÐµÐ½Ð¸Ñ Ð³Ð¾Ð»Ð¾Ð²Ñ‹, лап и хвоÑта. Ðеобходимый вращательный момент на валах, на которых укреплены шеÑтерни механизма, обеÑпечивает реверÑивный многоÑтупенчатый редуктор. Ð”Ð»Ñ Ð¸Ð·Ð¼ÐµÐ½ÐµÐ½Ð¸Ñ Ð½Ð°Ð¿Ñ€Ð°Ð²Ð»ÐµÐ½Ð¸Ñ Ð²Ñ€Ð°Ñ‰ÐµÐ½Ð¸Ñ Ð²Ñ‹Ñ…Ð¾Ð´Ð½Ð¾Ð³Ð¾ вала доÑтаточно изменить полÑрноÑÑ‚ÑŒ иÑточника Ð¿Ð¸Ñ‚Ð°Ð½Ð¸Ñ ÑлектродвигателÑ.
ÐаглÑдное предÑтавление о работе механичеÑкой чаÑти игрушки дает ее кинематичеÑÐºÐ°Ñ Ñхема (Ñм. риÑ. 83).
При вращении шеÑтерни 44 против чаÑовой Ñтрелки «Ð¿Ð»Ð°Ð²Ð°ÑŽÑ‰Ð°Ñ» шеÑÑ‚ÐµÑ€Ð½Ñ 39 перемещаетÑÑ Ð²Ð½Ð¸Ð·, зацеплÑетÑÑ Ñ ÑˆÐµÑтерней 38, котораÑ, в Ñвою очередь, передает движение на коленчатый вал 37. Ðтот вал, шар — нирно Ñоединенный Ñ Ð¿ÐµÑ€ÐµÐ´Ð½Ð¸Ð¼Ð¸ лапами 1, заÑтавлÑет их каÑатьÑÑ Ð¿Ð¾Ð»Ð°, Ð¸Ð¼Ð¸Ñ‚Ð¸Ñ€ÑƒÑ Ñ…Ð¾Ð´ÑŒÐ±Ñƒ. Задние лапы 25 передвигаютÑÑ Ð±Ð»Ð°Ð³Ð¾Ð´Ð°Ñ€Ñ ÑˆÐ°Ñ€Ð½Ð¸Ñ€Ð½Ð¾Ð¼Ñƒ Ñоединению Ñ Ð¿ÐµÑ€ÐµÐ´Ð½Ð¸Ð¼Ð¸ через Ñ‚Ñги 26. Во Ð²Ñ€ÐµÐ¼Ñ Ñ…Ð¾Ð´ÑŒÐ±Ñ‹ движетÑÑ Ñ…Ð²Ð¾ÑÑ‚ 21 и поворачиваетÑÑ Ð³Ð¾Ð»Ð¾Ð²Ð° 9.
Ð Ð¸Ñ 83 КинематичеÑÐºÐ°Ñ Ñхема
ТÑгу хвоÑта 21 приводит в движение шеÑÑ‚ÐµÑ€Ð½Ñ 41, кривошип 43 и Ñ‚Ñга 42, а Ñ‚Ñгу 5 головы — рычаг 3, прикрепленный к валу шеÑтерни 44. ÐеÑущим Ñлементом конÑтрукции ÑвлÑетÑÑ ÑˆÐ°ÑÑи 27 (Ñм. риÑ. 82), на котором уÑтановлены редуктор 30, Ñлектродвигатель 31 и вÑе оÑтальные детали. Они закрыты кожухом. ШаÑÑи и Ð±Ð¾Ð»ÑŒÑˆÐ°Ñ Ñ‡Ð°ÑÑ‚ÑŒ деталей механизма изготовлены из лиÑтовой Ñтали толщиной 0,8 мм. К шаÑÑи вдоль ребра жеÑткоÑти в меÑте Ñгиба припаÑна накладка. ТÑги 6 и 26 изготовлены из Ñтальной проволоки диаметром 1,5 и 2,5 мм ÑоответÑтвенно. Ðа концах вÑех Ñ‚Ñг проÑверлены отверÑтиÑ, в которые вÑтавлены шплинты из проволоки. БольшинÑтво деталей конÑтрукции фикÑировано винтами Ðœ2.
Редуктор — Ñамодельный, изготовлен из шеÑтерен от Ñтарых игрушек. Ð’ÐµÐ´Ð¾Ð¼Ð°Ñ ÑˆÐµÑÑ‚ÐµÑ€Ð½Ñ 32 редуктора Ñцеплена Ñ Ñлектродвигателем шеÑтерней диаметром 7 мм, наÑаженной на его вал. Боковые Ñтенки редуктора изготовлены из лиÑтовой Ñтали толщиной 1 мм. Их крепÑÑ‚ Ñ‚Ñ€ÐµÐ¼Ñ Ð²Ð¸Ð½Ñ‚Ð°Ð¼Ð¸ Ðœ2,5. Ðа винты между плаÑтинами надевают металличеÑкие втулки Ñ Ð½Ð°Ñ€ÑƒÐ¶Ð½Ñ‹Ð¼ диаметром 4,5 мм и длиной 15 мм. Кривошипы, надеваемые на валы, Ñделаны из латуни (или из дюралюминиÑ).
Батарею 3336, питающую Ñлектродвигатель, крепÑÑ‚ на шаÑÑи Ð´Ð²ÑƒÐ¼Ñ Ñкобами 20 (Ñм. риÑ. 82), а монтажные платы 16, 18 дешифратора — на плаÑтмаÑÑовых Ñтойках 17 и 19. Ð’ игрушке иÑпользуетÑÑ Ñлектродвигатель ДИ1 — 3 14МО 390 001 ТУ. По Ñравнению Ñ Ð´Ñ€ÑƒÐ³Ð¸Ð¼Ð¸ аналогичными двигателÑми он обладает повышенной мощноÑтью, выÑоким КПД, низким уровнем акуÑтичеÑких шумов и радиопомех.
Пищалка 10 Ñделана из плотного картона и оклеена калькой. Внутри закреплена раÑÐ¿Ð¾Ñ€Ð½Ð°Ñ Ð¿Ñ€ÑƒÐ¶Ð¸Ð½Ð° из Ñтальной проволоки диаметром 0,5 мм. Звук издает металличеÑÐºÐ°Ñ Ð¿Ð»Ð°Ñтина толщиной около 0,08 мм, Ð²Ð¸Ð±Ñ€Ð¸Ñ€ÑƒÑŽÑ‰Ð°Ñ Ð¿Ð¾Ð´ дейÑтвием Ñтруи воздуха, входÑщего в полоÑÑ‚ÑŒ пищалки. КрепÑÑ‚ ее к Ñтойке 11, припаÑнной к нижней чаÑти головы. Голова 9 и кожух — из папье-маше (обрезки хлопчатобумажной ткани, пропитанные казеиновым клеем).
ÐлектромеханичеÑÐºÐ°Ñ Ñ‡Ð°ÑÑ‚ÑŒ игрушки Ñложна в изготовлении. Ðо трудноÑти ее Ð¸Ð·Ð³Ð¾Ñ‚Ð¾Ð²Ð»ÐµÐ½Ð¸Ñ ÐºÐ¾Ð¼Ð¿ÐµÐ½ÑируютÑÑ Ñ€Ð°Ð´Ð¾Ñтью, которую вы получите от Ð¾Ð±Ñ‰ÐµÐ½Ð¸Ñ Ñ Ñтой веÑелой игрушкой.