HOW TO BUILD YOUR OWN WORKING ROBOT PET
BY FRANK DaCOSTA
TAB BOOKS Inc. BLUE RIDGE SUMMIT, PA. 17214
This step-by-step guide to creating a unique robot of your own, from a boxful of components to finished, working reality, takes you through all the steps needed to construct and train your own electronic, microprocessor-based pet that can do what you want it to do. You program its intelligence and its temperament. You decide what it will look like. Included is all the technical data you need on interfacing the body, building the power system, constructing circuits, putting together the mechanical and locomotion system , programming the brain, etc. You alone decide how far you want to go with this fascinating project.
The pet you build is not a theoretical model or a simplified toy, although construction is not difficult for the average computer hobbyist—the result is a practical, working robot that, when finished, will amaze even you.
Here are just some of the features you can build into your robot: a sonar distance measuring circuit (Soniscan), similar to the navigational methods used by dolphins and bats, to allow the robot to turn away from obstacles without making contact; a self-charging system that allows your creation to recharge itself when hungry; a system (Excom), so the robot can hear you; an understandable language and grammar (Fredian), for communicating with the robot, a means of speech (Audigen) so the robot can "talk" with you; random motion programming which makes the robot pet behave like a live one, making noise, running around, sleeping in a corner—all in an unplanned format which you can interrupt with just a simple command in Fredian; and much, much more.
There's virtually no limit to the features you can design into it—and this book makes it all possible. The author shows you how to
approach every step, using the 8085 microprocessor chip as a brain. Yet there's room for experimentation, too, and this innovative text makes sure that you'll be stimulated to try out ideas of your own! No matter where you want to go with this exciting project, however, this book makes it all a reality, explaining each step in vivid detail. If you're looking for a really challenging and stimulating project, this is the book for you!
The author is an experienced technicican in the computer field who has published several articles and is an avid robotics experimenter. A Trinity Divinity School graduate, he lives in Hollywood, FL. with wife Cheryl.
ISBN 0-8306-1141-X
Chapter 1
Birth of a Robot Pet
It started innocently enough, during the good humor of a summer evening. My wife and I were pondering the fact that our apartment complex would not permit us to own a pet dog. Half in jest (little did I know!), I boldly countered, "Well, if we cannot have a real dog, we'll just build one—a robot dog!" You can guess the flurry of wit that followed— "Electricity is cheaper than dog food!" —and yet, there was anticipation. Could such a project be realized?
This volume presents the entire design and construction of a robot pet. Anyone who tackles this project, though, will gain far more than a housepet. For the robot pet is a sort of tutorial experience, a tribute to three related fields of science. The first is the field of mechanics, the basis for the body of the pet. The second is the field of electronics, especially as manifested in the advent of the Microcomputer Revolution, the source for the brain of the pet. The third is the infant study known as robotics, the foundation for the design philosophy of the pet.
DEFINITION
What is a robot? A steady diet of science-fiction may leave you with some misconceptions. Simply speaking, a robot is an electromechanical simulation of animal life. That is, a robot is a machine which exhibits many or most of the characteristics evident in animals and in man. This definition has a direct bearing on the design of the robot pet and similar automata.
9
Living things demonstrate a host of hard-to-simulate characteristics. Just to give an idea, consider the following:
â– Animals are aware of their environment through a variety of senses.
â– They move around in that environment.
â– They manipulate it with their limbs.
â– They communicate with others in it.
â– They sustain themselves in it by consumption of food.
â– They coordinate all these activities according to some system of decision-making and "prioritizing."
A machine becomes more worthy of the term "robot" as it manages to genuinely integrate more of these living characteristics into its design. Figure 1-1 attempts to picture these traits as they relate to one another.
The pet robot, by the very nature and purpose of its design, is built to exhibit each of these characteristics to one or another degree. Thus, the completed pet will be quite "lifelike," because the major observable qualities of life are demonstrated. In addition, the high degree of integration involved in the robot pet system ensures that all of the characteristics interact, in much the same way that they do in true life. That is, the pet robot is not a "puppet," manipulated to look like it is making logical, lifelike decisions; it is truly playing out lifelike processes, though on a much lower level.
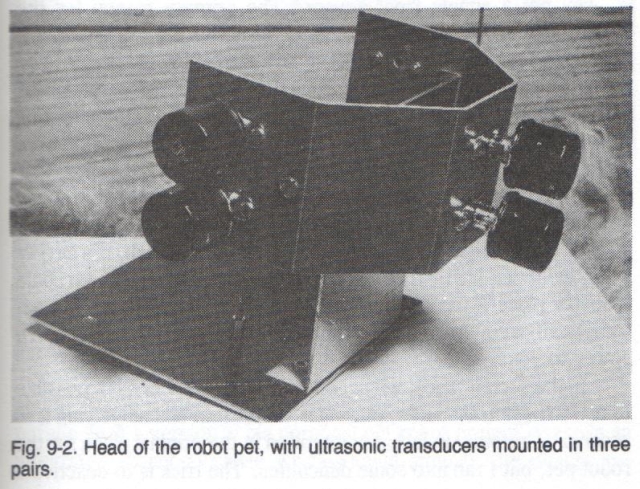
The robot pet, then, like a living thing, is aware of its environment. We are familiar with the five senses in Man and animals, the primary one being vision. The pet robot uses a heightened sense of hearing, coupled with the ability to emit ultrasonic pulses, as its primary sense. It is termed Soniscan in this volume, but it is in reality merely an electronic version of the same sort of thing that bats and dolphins have been doing for many years—navigation by echo- detection. The pet robot cannot "see" in the conventional sense, but Soniscan is enough to prevent collision with obstacles.
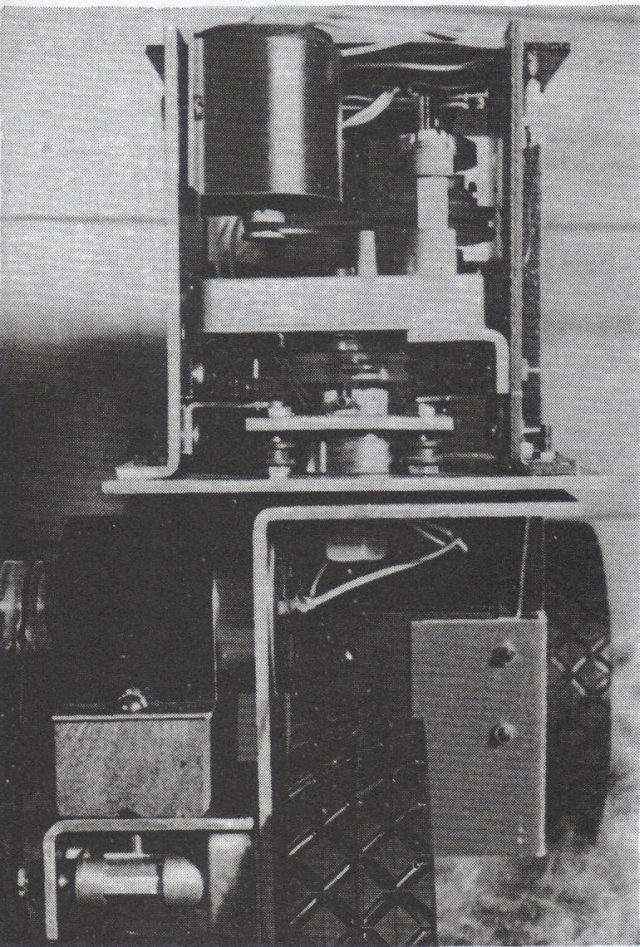
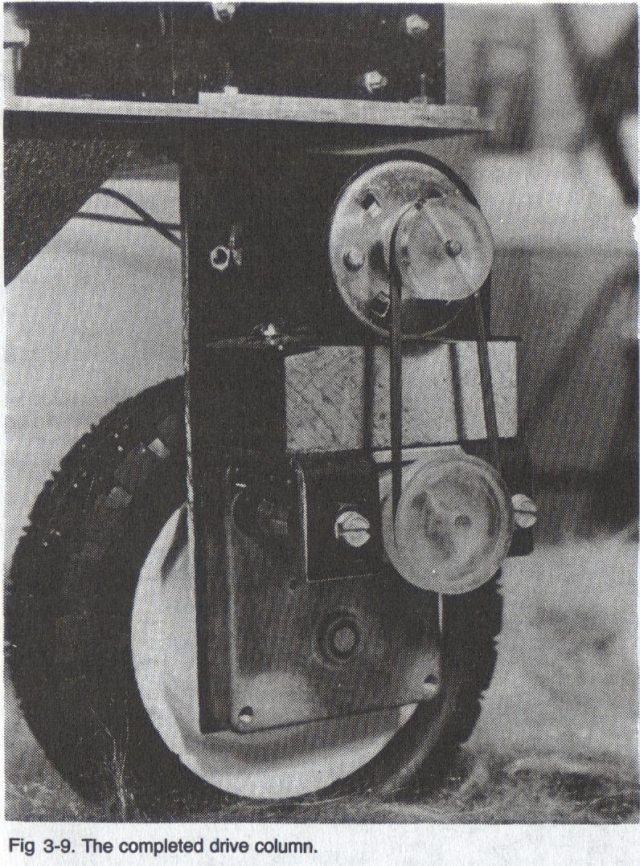
The pet robot can move around in its environment. We're used to seeing the family dog jump down from the couch and run to the front door, using those embodiments of agility, the legs. The pet robot has no legs, but makes use of a strong front-wheel drive mechanism to get around. The mechanism allows forward or reverse motion and some 16 different turning-angles, all under the full control of the pet's "brain." It may not replace legs, but it's maneuverable enough to get the pet in and out of tight spots. The robot pet can nominally manipulate its environment as well, since the drive mechanism is strong enough to push small obstacles in its path.
10
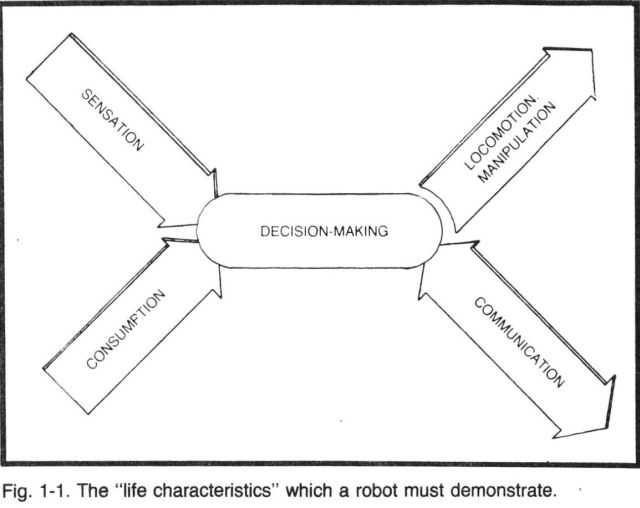
Fig. 1-1. The "life characteristics" which a robot must demonstrate.
The robot pet can communicate with others in its environment. We expect our dogs to bark, our cats to meow. And through careful observation, we learn that this is an "I want to go outside" bark or an "I'm hungry" meow. The pet robot, by means of its Audigen (for audio generation) circuit, has a set of synthesized sounds with which to indicate its "moods." And since the builder/programmer determines what triggers these sounds, they can carry much more information than the typical dog's bark, approaching a set of "audible diagnostics."
In turn, we send our pets to obedience school to "teach them to listen." We expect our dogs to stop barking when we tell them to do so. The robot pet can hear and understand vocal commands given it by its owners, by means of a circuit called Excom (for EXternal COMmand). It requires that the owner learn to speak the pet's language a bit, but it is at least a spoken language—the owner doesn't require a remote control box. And once again, since the owner is the programmer, he can attach definitions to the new language at will, making the Excom an effective means of communications.
The robot pet requires sustenance in its environment to continue on. People and their pets recharge their energy cells by the complex chemical processes involved in eating. The robot pet operates directly from electrical energy stored in its lead-acid batteries. "Mealtime" for it is a trip to the charger to restore its levels for
11
renewed activity. The majority of the pet's weight belongs to the power system, but if it's a choice between mobility with extra weight versus a line-cord umbilical with less weight, I advocate the more "lifelike" choice—mobility.
Finally, the pet robot orders all of its activities according to a centralized, prioritized goal system. In life, we have the example of the brain, a highly-complex data center which engages itself in four main functions:
â– Remembering MI Perceiving
â– Deciding
â– Controlling
There are many electronic circuits which can be used to perform one or a few of these tasks. But there is one sort of circuit which can handle them all, in a manner analogous to a living brain—and that is the microprocessor. The robot pet makes use of the Intel 8085A, one of the most powerful 8-bit microprocessors available today. A basic microcomputer is built around this processor to form the Robot Control Unit-85 (RCU-85). The RCU-85 can remember by using its random access memory; it can perceive with external TTL circuits interfaced to its input ports; it can decide by means of its powerful instruction set and versatile programming philosophy; and it can control with external circuits accessed by its output ports. In complexity, it is far from a living brain; in operation, however, it is quite similar.
So, then, the pet robot is a machine designed to simulate life in its primary aspects. Consequently, the person attempting its construction should be aware of the task ahead. Life is complex; pseudo-life must reflect this complexity somewhat. The pet robot is not the sort of thing one builds as a toy for his son. It is a difficult project, if only from the standpoint of time involved.
12