Partial extract from Mittelmann's homepage – see here for full description of all KYTRONs.
What is a KYTRON?
A KYTRON is a small autonomous vehicle. Its name comes from KYBERNETIK (German for cybernetics) and ELEKTRONIK (German for electronics).
Another way to define a KYTRON would be as a small electro-mechanical device mimicking some aspects of natural life.
Finally a KYTRON could be described as a small mobile robot doing nothing meaningful except keeping itself happy.
What does a KYTRON do?
A KYTRON drives around, looks for light and tries to avoid obstacles. With enough light from the environment it is able to reload its batteries using its solar panels. In the dark it is able to follow tiny light sources like torches or even the flame of a match.
How does a KYTRON work?
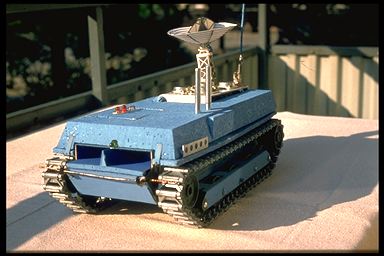
Many people associate KYTRONs with military tanks, at least at first sight. This may be because KYTRONs have caterpillar (crawler) tracks instead of wheels.
In fact, KYTRONs have nothing to do with military equipment at all, and are definitively not armed.
All five KYTRONs built so far feature tracks, but there is no reason that this will not change. I always had the plan to make one with (six) legs, like an insect. I am not much interested in designs with wheels, but then, this may change when I will see pictures of the new Mars rover. I also have to admit that the Lunokhod moon vehicle (8 wheels) of the Russians was a great design.
And yes, I had that soft-lined "translucent design" since 1975 (!!!)… see my images of KYTRON 2 and m-KYTRON 3 below and see also these new ones here and here. (Obviously these new images were taken in 1999.)
{kind=link}
{kind=link}
Which KYTRONs were built?
Until now, five KYTRONs were built: KYTRON 1, KYTRON 2, m-KYTRON 3, c-KYTRON 4, and KYTRON 5. In general they became smaller and smaller. Each is introduced below [see Mittelmann's homepage for info on other KYTRONs].
KYTRON 1

The first KYTRON was done in 1974. The mechanical parts were taken from a toy. The wheels and crawler tracks were plastic parts. The housing was made from foam plastic.
This KYTRON searched for light with three alternative optical sensor devices. The most advanced was a rotating sensor arrangement, using two light sensors looking forward, with an optical shield between them. When either sensor saw light, the motors were started so that the KYTRON would approach the light source.
If no light was seen, every 5 minutes the rotor was activated in order to find light in other directions. When such light, f.i. from behind, was detected, the KYTRON would turn the sensor device back to home position and simultaneously would turn itself to face this light source. Then it would approach it as above.
The obstacle avoidance capability of KYTRON 1 was very limited. It had a mechanical touch sensor on front. When detecting an obstacle, it would stop immediately and drive back a curve to the right. When trying to approach the light again, it would probably touch the obstacle again, but thanks to mechanical fuzziness it would (hopefully) finally manage to get by. KYTRON 1 was 30 cm long, 15 cm wide, and 12 cm tall. It was destructed in 1977 (see KYTRON 4). Its weight was 1.5 kg and its speed was 24 cm/s. It could operate 30-60 minutes from its Pb-gel batteries. The electronics consisted of about 100 parts, including 1 IC.