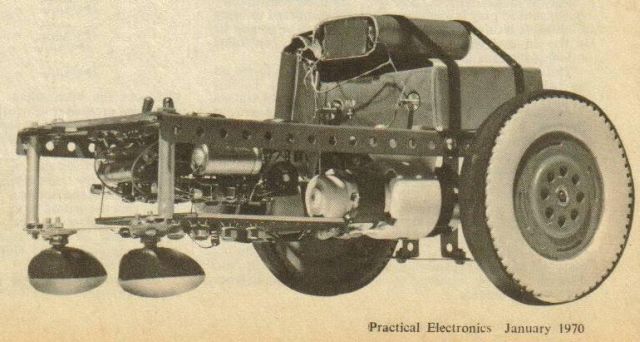
EMMA – Electronic Mime Mobile Animal
There were two versions of EMMA offered, the second one referred to as "Educated" EMMA, having a Condition Reflex cirrcuit added in. The pdf attached has the complete articles, but I've OCR'ed the introductory descriptions – see below.
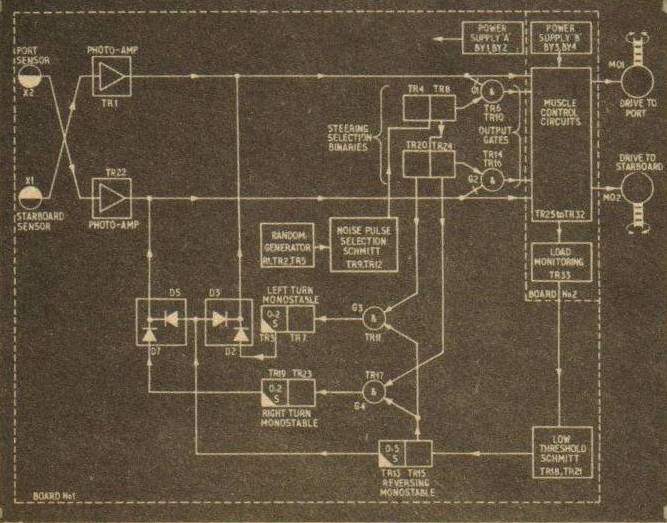
Block diagram of EMMA without additions.
EMMA
This article deals with the construction and operation of an electronic "animal" (or robot) and is consistent with the subject matter given in the current P.E. series BIONICS. The design concept has been based largely on data relating to the habits of "real live" animals called planaria. These animals, which represent a species of flatworm, are commonly found lurking beneath small rocks and boulders in many of Britain's streams.
Whilst planaria demonstrate a crude form of learning, our synthetic version (which we have called EMMA) will exhibit only certain in-born or innate characteristics. This project should therefore be considered an open-ended affair, in that it can later form the basis for an even more sophisticated "animal". But, while keeping in mind such limitations, it must be emphasised that the model EMMA as described in detail in this article is a complete design and will provide a practical demonstration of this rather unusual application of electronics. In a more general sense, purely as a novelty, EMMA is likely to arouse interest amongst even those who have no electronic knowledge.
In this opening article, we deal with the reflex circuits … involved in EMMA.
THE ANATOMY
An understanding of EMMA is best obtained by initially referring to Fig. 1 which is a block schematic of her anatomy. Like many real animals, particularly young ones, EMMA responds to stimuli in a rather negative fashion. By acting in such a way a fair degree of self preservation is thus afforded.
NORMAL FUNCTIONS
Under normal conditions the model will be capable of performing any one of four possible actions. These are
determined quite randomly through a noise generator and drive selector. The responses available in this mode are as follows:
(a) Moving straight ahead—both motors driving forward.
(b) Moving forward to the right—one motor stopped (starboard) and the other (port) driving forward.
(c) Moving forward to the left—one motor stopped (port) and the other (starboard) driving forward.
(d) Stationary—both motors stopped.
The bracketed port and starboard refer to the respective physical locations on the "animal's" chassis, not to the direction of turn.
When the model is able to adopt this mode of operation its behaviour is very much like that displayed by a living animal finding itself in a strange environment. This design concept is intentional, since under these conditions a creature endowed with a learning faculty would gradually behave in a progressively less random way as it became familiar with its immediate environs. The normal functions are, however, overridden at times when EMMA interacts with photic and tactile (touch) stimuli.
REFLEX FUNCTIONS—PHOTO-SENSE
The sensing of light is bilateral; two quite separate channels exist–left and right. Each channel derives its input from a photo-sensor and, following suitable amplification, has direct control over the forward mode of operation of the opposite channel. Hence if a strong light stimulates one of the sensors the animal will make a reflex movement away from the source of illumination (i.e. the creature is negatively phototropic).
The photo-responses are thus:
(a) Reversing in a straight line away from frontal illumination—both motors running in reverse.
(b) Turning left and away from illumination o the right—one motor (starboard) driving forward and the other (port) driving in reverse.
(c) Turning right and away from illumination on the left—one motor (port) driving forward and the other (starboard) driving in reverse.
LOAD-SENSING
A form of tactile sense, reliant upon "muscle" loading, is built into the model and is an improvement on an earlier version which relied upon a sensitive "touch-boom" arrangement. This scheme was found to be somewhat unsatisfactory due to both the single-ended sensitivity of the boom and the awkwardness of its aspect.
The later concept incorporated in EMMA has quite a different basis of operation. Indeed the system adopted here, whilst retaining a good measure of sensitivity to tactile stimuli, additionally makes provision for monitoring loads. Currently the response to loads is set for some predetermined threshold, but because the model is capable of being modified ad infinitum there is no reason why the load-sensing system could not ultimately constitute one of the inputs to a learning network.
Load sensing then is achieved by monitoring the current drawn by the drive motors. If some pre-set level is exceeded, as for example when the model encounters an obstacle, a Schmitt threshold circuit will be caused to fire. The output from this circuit can then either be fed to a memory system or as in the present application, to an avoidance circuit.
AVOIDANCE REACTION
During the time that the model is moving around it is likely to meet situations that it finds difficulty in extricating itself from; chair legs and so on representing a particular menace in this respect. In order to improve its chances (of survival!) in these tricky encounters, an avoidance system is employed which, following initial triggering by the load sensing circuit, causes the model to reverse away from the offending obstacle then quite randomly turn either left or right.
The randomness is derived from the noise generator. By making a turn in this rather unreliable way it can be demonstrated that EMMA stands a far more optimistic chance of moving out of trouble than would be the case if the turn was predictable.
WORK AND REWARD
A further point of interest arising from this loadsensing/avoidance reaction system is that EMMA will tend to respond both to obstacles in its path and additionally display something of "annoyance" if direct loads (in the form of added weight—heavy books, etc.) are applied. The constructor will here see even more interesting possibilities—a creature able to determine loads need only be interconnected with a learning network to be in a position to receive payment in return for work. Thus if instead of attempting to shake-off an unwelcome load (e.g. when its battery is low) it accepted the task and was later rewarded (with a recharge), it would have learnt that to work was to survive—a not altogether unreasonable assumption! This more ambitious type of project will be a feature of the future article mentioned earlier.
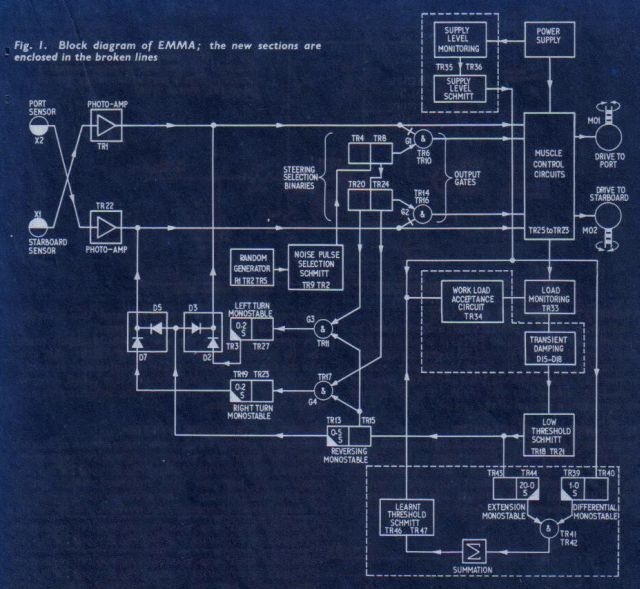
Block diagram of EMMA with additional Conditional Reflex added.
SINCE the formative weeks following EMMA's rather difficult birth back in March she has, as we
would have expected, already come of age. Indeed, she now exhibits a kind of self-preservation awareness which encourages her to perform simple work tasks for a living. More accurately, given the right situation EMMA really -wants" to work because to do so is now part of her make-up and she can learn that quite often this will pay-off.
In order to embody this new faculty EMMA's shape has filled out just a little with an additional circuit board. However, the modifications to her existing systems are not unduly complicated and the keen Bionics constructor will probably be overjoyed to know that at last he can have a semi-intelligent
ANATOMICAL CHANGES
To encourage EMMA to work in return for reward requires a few extra circuit blocks and if the reader refers to Fig. 1, a clear impression of the technique will be gained.
The philosophy behind the original scheme for EMMA has not been changed drastically, but there are now included such items as a Schmitt trigger which monitors the supply voltage level and of course the inevitable learning circuit with which by now we must all be familiar. This embodies a pair of monostables, one (the extension monostable) having a duration of 20 seconds and the other (the differential monostable) a period of 1 second.
DESIGN PHILOSOPHY
Now it is intended that EMMA should learn to work, so this implies that she must additionally have a need to work in the first place. If a situation is made sufficiently attractive she will be prepared to do some simple chore provided she has a previous memory of being rewarded.
These requirements are largely accommodated by deliberately reducing EMMA's muscle control supply for short periods. This makes her hypersensitive to loads during which she is encouraged to carry a heavy book or similar object.
Periodically we may give her some -reward- by returning the supply to normal so that she realises that we intend to pay her when the work has been done. We achieve all this in a somewhat synthetic way by switching out one of the cells forming part of the forward drive supply battery. Thus during conditioning her supply for the forward mode is a little less than 3 volts unless we provide a reward, in which case it rises to about 4.5V.
.jpg) pdf – EMMA Practical Electronics Mar-Apr 1969, & Educated EMMA PE Jan 1970.
pdf – EMMA Practical Electronics Mar-Apr 1969, & Educated EMMA PE Jan 1970.
Amazing to find this. It’s one particular project I remember – not being skilled enough to build it at the time, but was still fascinating. The noise source was something I always remembered.
Thanks very much for scanning this in. I remember this very vividly from my youth and thinking what a cool project. My grandfather was also very interested as he was head of the British Epilepsy Association at the time and very interested the operation of the brain.
Das habe ich kommen sehen :p Tollen Tag!