ROBOTICS: Featuring An Automated Pavlovian Dog!
Developed many years ago, in the "Pre-IC Age" these Robot Rovers could simulate such Classical Pavlovian Responses as: CONDITIONING, EXTINCTION, SPONTANEOUS RECOVERY, LEARNING CURVES and HIGHER-ORDER CONDITIONING.

Three-deck stepping-relays comprised the main elements of the dog's memory. A few transistors were used for "eye" and "ear" sensors, plus a "tail-wagging power amplifier."
Frederick W. Chesson
I knew of the April, 1961 "troubles" at SJ, but it was only when I was working in the Middletown area c 1961-69 that I regularly commuted through Berlin and got regular glimpses of the place and heard about it from fellow workers that I had any inclination to wonder what went on there. In that general period, I had developed the "Automated Pavlovian Dog" teaching-machine (also on my web site) that led to a connection with the Psychology Dept. at Wesleyan University. The "dog" was shown there and to a number of schools, hoping to build up my psych-lab construction business. I also attempted to interest Mr. Francis, knowing of his background, but by then in the late 1960s he had become excessively suspicious of my innocent motives, that resolved to "keep tabs" on what further incidents went on at SJ…which were all-too forthcoming over the next few years until the place finally closed for good.
Fred W. Chesson. E-mail 15 April 2006
The experiments with dogs relating to Classical Conditioning by Dr. Pavlov, earning the Nobel Prize for Medicine and Physiology in 1904, have been simulated over the years, culminating with today's extensive computer programs.
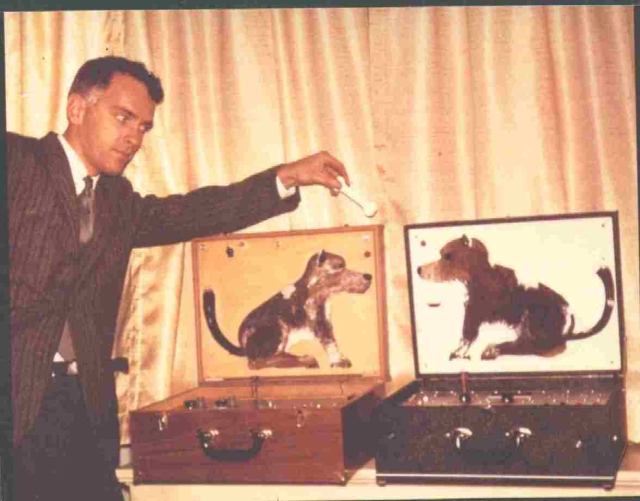
The robot dogs shown in the photograph were developed by the author in the early Sixties, when the teaching-machine "fad" was approaching its heady zenith. At the time of the design, relay logic still had a cost advantage over the contemporary RTL gates, but some transistors were employed for the "eyes" and "ears" of the automated canines.
Pavlov's experiments into Classical Conditioning underly much of modern learning theory; hence, if a robot, android, or humanoid is to learn, it is desirable to know what conditioning is all about. On a basic level, Pavlov rang a bell, then fed the dog, measuring the animal's response by the amount of saliva generated. After a while, the bell alone could evoke a salivatory reaction. On a human level, do our mouths not water at the mere aroma of a tasty pie? Or even at the verbal cue: "Dinner's ready!"…? But should the announcement prove false or premature, our anticipatory responses will diminish markedly. They can, however, be readily restored, along with our faith in human nature.
Thus, the electro-mechanical dog was designed to perform the following simulations, which will be examined: conditioning (learning), extinction (forgetting), spontaneous recovery, higher order conditioning, learning curves, memory of stimuli occurrences, and stimuli hierarchy.
In operation of the simulator, pressing the RESET switch puts the robot dog at an untrained level (electronic brainwash!). Salivation being somewhat difficult to imitate, the response to feeding was represented by having the dog wag its tail, a readily observable act of canine satisfaction. To hold the interest of younger students, the feeding stimulus was simulated via a plastic bone having a concealed magnet. When the magnet end of the bone was in proximity to the dog's "nose," a reed switch was closed, activating a tail-wagging power transistor and solenoid.
Via a microphone and photocell, the dog could "hear" and "see." Normally, the audio stimulus was dominant, activating a Schmitt-trigger delay for a preset time interval. If the food stimulus was presented during this period, an AND gate caused this coincidence to be recorded by the Conditioning Event Counter, a ten-point stepping relay. (Today's equivalent probably being a CMOS type 4017 decimal-decoded counter chip.) Thus, when a preset number of coincidences had been registered, a relay flip-flop circuit caused the dog to now wag its tail to the sound stimulus as well as to food.
So long as occasional sound-food coincidences, (reinforcement), occurred, the conditioned state would be maintained. But after another preset number of sound-stimuli without food following, (anticoincidence), say five, the flip-flop resets the dog to an unconditioned state, and it must be retrained.
Sometimes, the experimenters found their animals would recover their condition, (spontaneous recovery), without any apparent external action.
This is similar to being given a telephone number in the afternoon, then forgetting it by night, only to have it suddenly come to mind the next morning, apparently released from some buffer-storage in the subconscious.
In the simulator, the spontaneous recovery function could be cut in and its "latent period" set by a potentiometer. Should normal conditioning then be re-established before it can act, it is reset for future use. Once it has acted, however, it is of a one-shot nature; following a second extinction, true conditioning must follow for the SR circuit to be reset.
After conditioning and extinction, Pavlov found that his dogs not only relearned faster, but that their conditioned response was more resistant to extinction. This learning curve holds true in human education, as anyone who has learned a mathematical equation or foreign language will agree. Learning something the second time around nearly always is quicker and seems to stick longer as well.
The learning curve simulation required multi-level stepping-relays in the original model, whose pick-off points were determined in connection with the original settings for conditioning and extinction counts. Thus, the original number of four coincidences would be reduced to three and then only one, while the anti-coincidences for extinction might be increased from five to six or
seven, and then to eight or ten.
When the living dog has been very well trained to salivate to the sound of the bell, it was found that the bell as well as food could be employed to condition him to a new stimulus, such as light. This is called Higher-Order Conditioning, and represented the simulator's highest accomplishment, being activated by the learning curve counter.
While the above model and its concepts are quite elementary, they still furnish a base upon which increasingly diverse and subtle forms of learning behavior may be simulated and explored. It has been found, for example, that conditioning is more resistant to extinction when every trial stimulus is not always rewarded. Such variable reinforcement scheduling, could lend itself readily to microprogramming applications.
"Way back in the dim '60s, in the midst of the Teaching Machine Era, I came up with a Pavlovian Dog demonstrator. (Two were actually built) Responding to food (magnetic bone) sound and light stimuli, the concepts of Conditioning, Extinction, Learning Curves, Spontaneous Recovery and Higher-Order Conditioning were presented. (All done with relay logic and memory back then!)"
Fred W. Chesson
The Interface Age1978 article does not include the images above.
A precedent to the Tamagotchi?