With Sonar using Zenith television remote control 40kHz audio transducers, and vision using the then new vidicon image tubes.
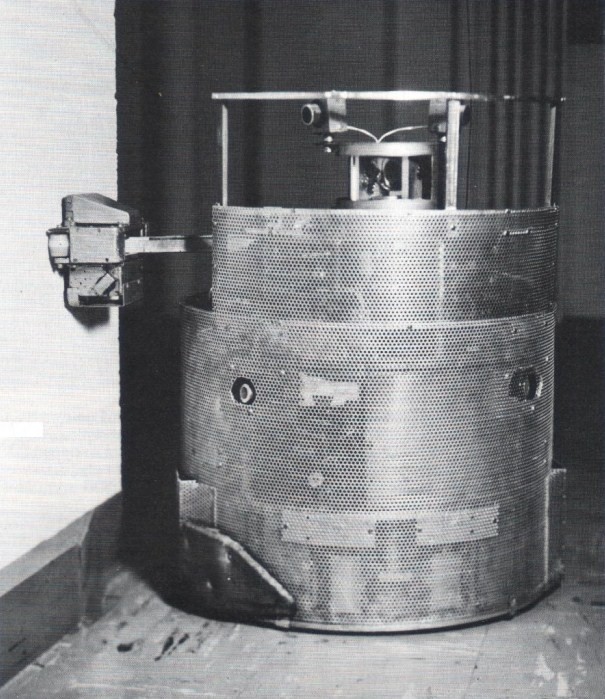
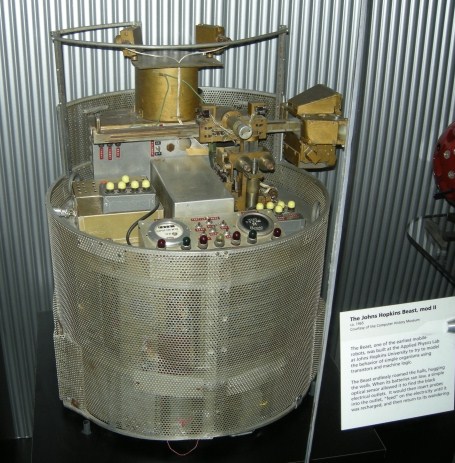
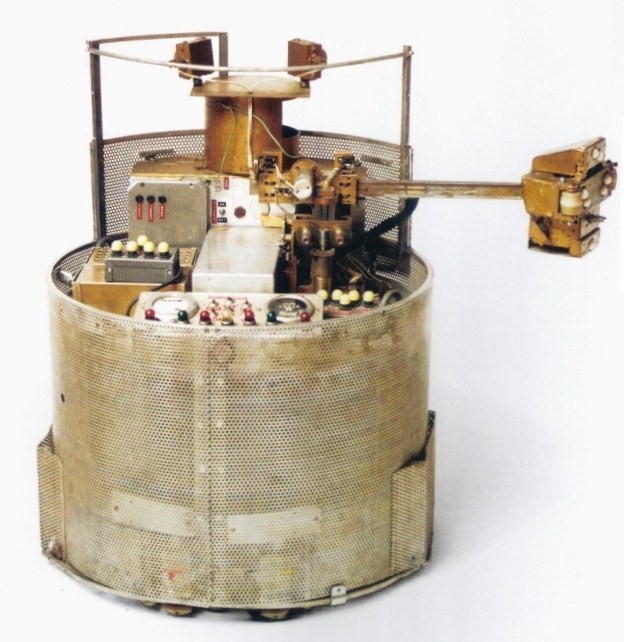
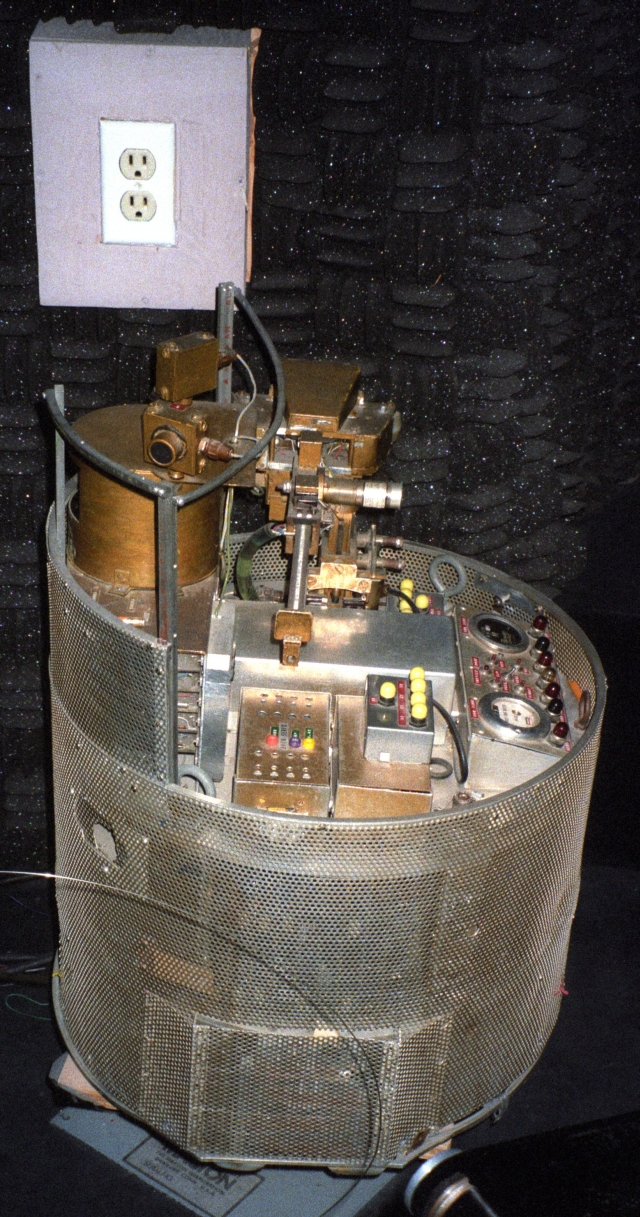
Mod II is actually facing forward, to the front. the boom arm if effectively its right-arm and extends when searching for an AC outlet. The Zenith ultrasonic transducors can be seen both on top and withing the skirt. They were used for forward and limited sideways sensing when travelling forward down a corridor. The hanging skirt had touch sensors when lower obstacles were encountered. The holes in the mesh show existing untrasonic sensors.
Update: July 2013 – JHU APL have released a video clip (see below) showing the new vision system.
See earlier versions of the Mobile Automatons here:
 1961 – APL-JHU "Ferdinand" Mod I
1961 – APL-JHU "Ferdinand" Mod I
 1962-3- APL-JHU Hopkins "Beast" Mod II pre-sonar
1962-3- APL-JHU Hopkins "Beast" Mod II pre-sonar
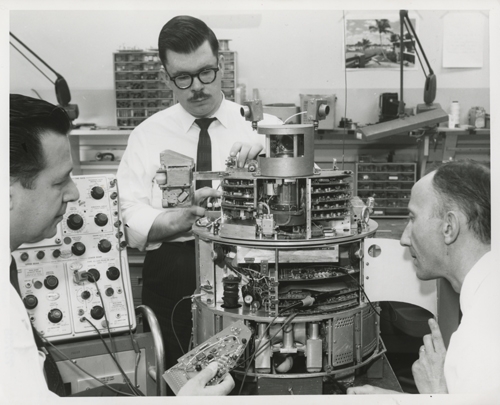
"Mar 31 1965" Photo No. 73738; UNDER THE SKIN….Leonard Scheer, left, William Whitmore with automaton, and Dennis Walters have removed the bumper and cover from automaton to examine the complex electronics.". Photo of three men examining and working on the electronics of a robot in a laboratory/shop environment.
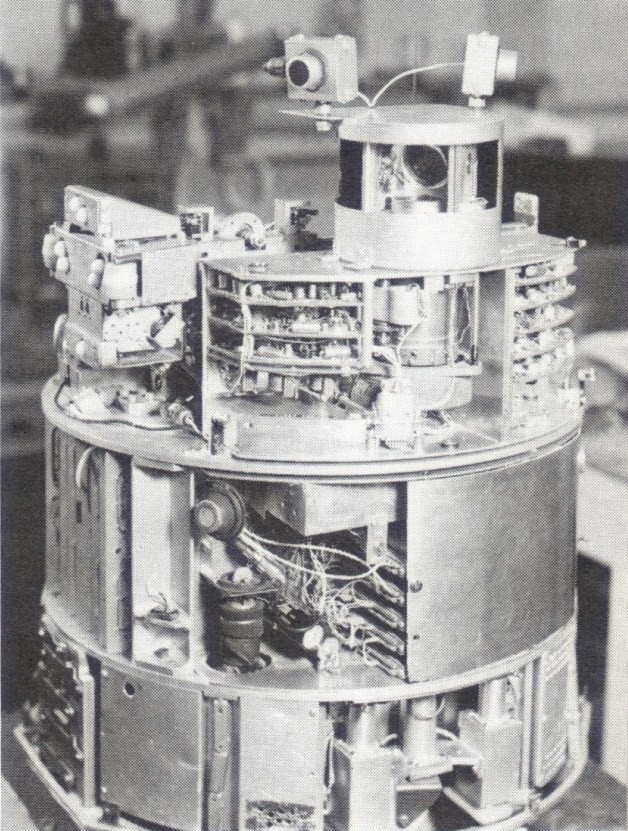
You can see the vidicon tube clearly in this image. It is mounted vertically with a round 45deg. mirror pointing towards the wall. The viewing direction appears to be just in front of the electrical outlets, otherwise it would be pointed slightly backwards if to directly view the outlet or scan the wall.
In June 2008, Hopkins Beast was doing the rounds in the US with the "Star Wars: Where Science Meets Imagination" exhibition. I was disappointed when the exhibition came to Australia in late 2009 and the Beast was not included.

Above: You can see where the arial plugs in. This was to send and receive signals from the remote telemetry unit.
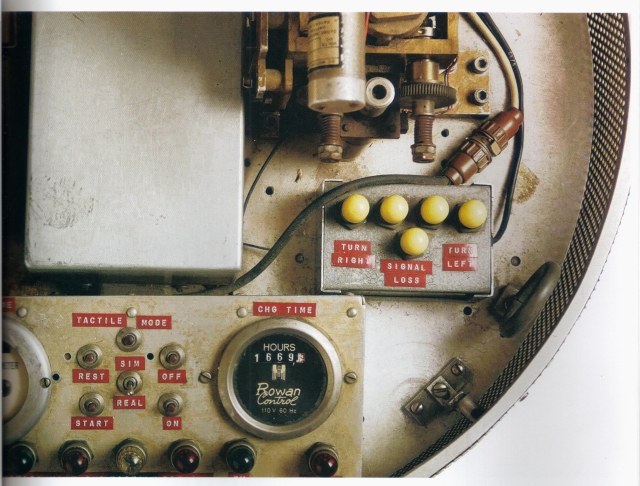


Running hours = 1929, Battery-Charging hours = 1669., giving a total of 260 hours running autonomously. That's roughly 84% of its total life spent just "feeding". Its longest single run was for 40.6 hours before some simple mechanical failure stopped it.
I was fortunate enough to make contact with Ron McConnell in January 2008. Ron was with the APL-JHU team in the early 60's and worked on Mod II.
His email address no longer works and I see no recent items by Ron when I scan the web, so I fear the worst.
To that extent I have published most of the email content that he sent over that time. It is quite insightful, and I thank you, Ron, for the information you imparted. The bibliography is particularly extensive and useful.
Ron McConnell Correspondance from January 2008.
Subject: A Robot in Every Home, SciAm 2007 January — APL-JHU PioneersBelow is a letter I sent to Scientific American magazine last year that was not published.
===================FYI.
Letter to the Editor
Scientific American magazine.NOTE: It was still "ARPA" (Advanced Research Projects Administration)
in 1965 "DARPA" [Defense ARPA] came later.—–Original Message—–
From: Ronald C. McConnell
Sent: Wednesday, January 03, 2007
To: editors@sciam.comA Robot in Every Home, SciAm 2007 January — APL-JHU Pioneers
I read Bill Gates' article "A Robot in Every Home"
(Scientific American, January 2007, pages 58-65)
on developing a common programming language
for robots in order to spur the development
with great interest – and a sense of déjà vu.
Over forty years ago in the early 1960s,
Applied Physics Laboratory – Johns Hopkins University (APL-JHU),
Silver Spring, MD, had its own in-house funded mobile automata project.
The robot group built two functioning prototypes
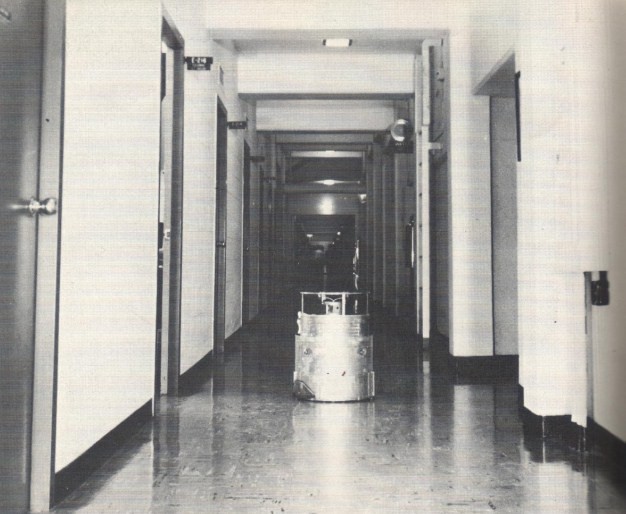
that roamed and "lived" in the hallways of the lab,
avoiding hazards such as open stairwells and doors,
hanging cables and people
while searching for food in the form of AC power
on the walls to recharge their batteries.
They used the senses of touch, hearing, feel and vision.Programming consisted of patch cables on patch boards
connecting hand built logic circuits to set up behavior
for avoidance, escape, searching and feeding.
No integrated circuits, no computers, no programming language.
With a 3 hour battery life, the second prototype survived
over 40 hours on one test before a simple mechanical failure disabled it.ARPA came by, but in the era of early near-earth, manned space flight,
wasn't really interested in prototypes of robots to explore the Moon,
Mars or the underseas on Earth. Johnson Wax wanted to know
if a robot floor waxer was feasible. Jet Propulsion Labs was interested
in starting a robot program and came by to see
what APL was doing and planning.
There was coverage by the media of the day in US and foreign magazines,
a spot on the NBC Today television show,
and a brief clip in one documentary.
The clip recently showed up in a History Channel
"Modern Marvels" program on the history of robots
with no dialogue or text to explain what was seen.APL-JHU funds eventually ran out and the project ended
with plans and design underway for an undersea explorer robot.
Several years later the Soviet Union landed a Moon explorer.
Many years later the NASA landed roving Mars robots.
Undersea robots are in the water. The last I heard in the 1970s
the APL protoype robots were in the APL-JHU museum.
One was charged up and it ran.As young Virginia Tech co-operative engineering students,
Edwin B. Dean, Jr. (Physics) and I (Electrical Engineering)
were given (now amazing to me) responsibilities to develop
and test key systems, such as the sonar guidance system.
It was an experience of a lifetime. My career was spent
at Bell Labs working on many interesting and satisfying things,
but nothing with span of knowledge required by robots.It is great to see that the work is finally being done,
and done well in universities and in industry, in recent years.
Pioneers George Carlton*, John Chubbuck, and Leonard Scheer,
must finally feel justified.Cheers,
Ron McConnell
Ronald C. McConnell, Ph.D.
Bell Labs retired
APL-JHU alumnus*George Carlton used pigeons as computers in the days
after World War II and before transistors.
Check out "Project Orcon pigeon pecking missile guidance."
(Orcon for organic control)————————–
We referred to the robots as Mod I ("Mod one," the little blocky one) and Mod II ("Mod two," the larger, cylindrical version). The "Turtle," "Ferdinand" (Mod I) and "Beast" (Mod II) names came from the articles in the press, I believe.
Mod I relied on feeling its way along the walls to find AC electrical outlets. Mod II started that way and then we added a sonar guidance system, using Zenith television remote control 40kHz audio transducers, to allow it to go down the middle of the hallways and avoid obstacles. Then to find AC outlets we added a video system on top to watch the walls. We had a telemetry system to monitor the states of the various systems in Mod II and to send it general commands, like, "You are hungry" (when it wasn't). It all worked. With about a 3 hour battery life, Mod II survived over 40 hours before a mechanical failure stopped it.
Mod II was on the USA NBC network morning "Today" television show (1964?).
—————————————-
The mission of the robots was to survive in their environment, in the APL hallways, with no external help. Other than the radio commands for testing and demonstration purposes, like "You are hungry," they were on their own.
The long term goal was unmanned automata to land on the Moon, Mars, and elsewhere in space. The last work APL did before APL's funds ran out, was John Chubbuck laying out the design for undersea robots. All of these things did happen and are happening – later by others.
The hallways turned out to be more hazardous than expected for tiny, wheeled robots: stairwells, hanging cables from construction, open office doors into cluttered offices and labs, people, …
'Pirouette', 'Rattle-out', and 'Panic' modes were patched in to help them escape from entangling cables caught on the booms, out of office "caves" and the like.
The robot logic was all hand-built, discrete logic gates and functions using transistor-diode NOR gates, flip-flops, timers and some other function blocks. Several gates were built into small plug-in modules. Remember, integrated circuits were just getting off the ground, were expensive, limited in capability and power hungry. We used a Philips transistor, the smallest discrete transistor (ever?) made. I forget the model number. When we learned they were being discontinued, we ordered the two or three thousand available.
The basic logic modules were plugged in several larger circuit boards. Some of the most basic behavior was fixed by hard-wiring between gates. The adaptive main behavior was programmed by plug-in cables on a master patch-panel under a cover on top. This allowed changes and additions as planned behavior patterns didn't work or the robot encountered unexpected hazards.
The sense of feel was by micro-switches.
The booms that went along the wall had an outline in switches of the AC outlets. (Picture in the folder-[not sent-RH]). It first felt something of the right width of the wall plate, then moved up and down to look for the top and bottom. The outlets were not all at the same height. Then, if it found the plate, it tried to plug in. The sockets were the US three wire variety. Some were upside down.
If the first plug-in attempt didn't go in holes. The robots would next try the upside down height. If it plugged in and found AC, then it would charge up its batteries until they were full. If the robot didn't sense AC, then the THWIT (The Hell With It) function kicked in, and the robot unplugged and went on its way.
None of the outlets in the hallways were mounted sideways. That would have taken only a few more roller micro-switches on the boom face.
The front bumper of Mod and the hanging skirt around Mod II had rollers with micro-switches outside the drive wheels to detect vertical hazards such as stairwells or steep inclines.
Mod I only had wall-hugging travel guidance using its boom as the feeler to stay near the walls.
The video system for Mod II used the then relatively new vidicon image tubes. They system was set to watch for rectangular images with about the right aspect ratio for the AC outlet wall plates. This could be from all the way across the hall when Mod II was using its sonar guidance, not wall-hugging, travel mode.
The batteries were built of wet silver-cadmium cells, not nickel-cadmium, each cell about 3/4" by 2" by 3". Ag-Cd is smaller than Ni-Cd for the same energy capacity. I need to refresh my memory, but I think there was one battery bank for the electronics and one for the wheel and boom motors.
Ed Fischer of the APL radio systems area was contracted to design and build the radio telemetry system. He adapted model airplane radio control system technology and parts. I became the caretaker of the system after it was delivered. It used tuned acoustic reeds to detect the many analog encoded signals from Mod II. They needed tuning regularly. As a result of this caretaker task, I often got the assignment of demonstrating the robots for the reporters and other guests who came to see what we were doing.
NASA Jet Propulsion Labs was just getting started on their mobile automata project and they came by.
Johnson Wax came by to see if we could design a robot floor cleaner and waxer like the ones that are now common 40 years later.
I hope we can contact Leonard Scheer or John Chubbuck who did most of the design for the robots. I feel/fear that our leader, George Carlton, may not with us since he was in his fifties in the early 1960s.
As I have mentioned, Ed Dean and I were just co-op engineers-in-training from Virginia Tech. I need to try again to contact Ed. It's been too long.
————————————-
I said, "…unmanned automata to land on the Moon, Mars, and elsewhere in space. … undersea…"
The reasons to use unmanned devices is that they can be deployed cheaper, faster and without the risk to humans for the tasks for which they are suited. There are some tasks for which humans are needed, of course.
These unmanned devices need to be automata because the radio propagation time delays in space and the lack of radio contact undersea prohibits fast survival action when hazards or unexpected conditions occur.
Manned space flight was _The_Thing in the early 1960s and soaked up all of the funding. I don't recall seeing any mention of undersea automata, such as the Rutgers Univ. and other projects, until decades later.
George Carlton, John Chubbuck, and Leonard Scheer may not have been the first to figure this out, I don't know,
but they were definitely among the first to actually _do_ something about making it happen. They just ran out of money, not practical ideas. At least the great-great-grandchildren of the APL robots are out there and under there.
————————————–I'm not sure just when the robot program started. It was likely about 1960. I started in 1963 (winter I think) when Mod I was already finished and Mod II was started. I finished up the sonar system that Ed Dean had started before he finished the co-op engineering program before his senior year.
Summer 1965 was my last time in the group and we were working on the Microducer Monkey Gooser for some medical researchers at Johns Hopkins U. who were studying the brain responses of monkeys to pressure on the skin. I think we did a few demos of Mod II for visitors.
By the way, the hanging skirt on Mod II also had micro-switches to detect when it bumped into horizontal obstacles. This was most useful before the sonar was installed. The sonar system caught most things to the front and part way to the sides.
The robots were in the APL museum for a long time. I think Helen said the museum was gone and Mod II was found somewhere in the building not too long ago. The batteries were long dead.——————————–
I've attached a couple of photos that I had already scanned. I've left them at low-compression/high-resolution. Note that Mod I had its own APL visitor badge. Don't know why it was only a "visitor" badge.
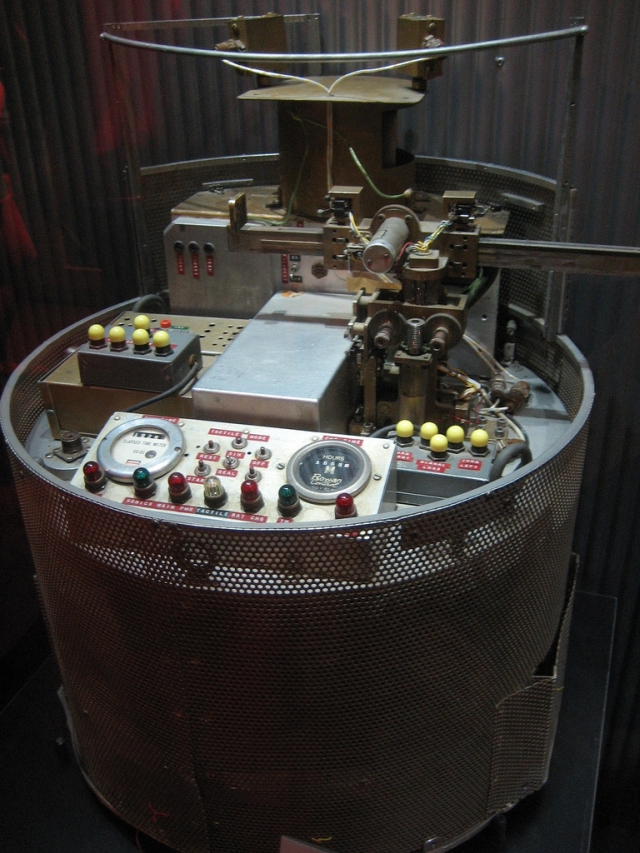
The box on top of Mod II in the middle covered the program patch panel. The space at the top front was where the sonar system was located later. The camera for the video system was located in there later – somewhere. I don't recall seeing a photo with it. You can see a couple of the horizontal sensor micro-switches up against the floating skirt.—————————————————-
When I finished my Ph.D. EE at Virginia Tech, the APL robot program had been gone over 4 years. I might have gone to work for APL, but the US Navy had cut their budget and APL wasn't hiring. I had a great, fun career at Bell Labs, but… I still missed the robots and what-might-have-been.
I spent the last several years in the Bell System on pre-DSL and DSL technology, writing system requirements and American standards for several generations: ISDN DSL, HDSL, ADSL (what is now called "DSL"), and VDSL (4 times the speed of ADSL). It took from 1983 until 2001 until I finally got my own (A)DSL at home.
An odd thought came to me in the middle of the night. As you may have noticed, the official name of the APL robot project was "CLM," maybe standing for something like "Central Laboratories Machines" since it was an APL funded project. (Most of APL's work was/is for the US Navy.) I would like to think it could have been "Clever Little Machines." 🙂
All of this APL robot material is over 40 years old. [from 2009-RH]
You say, "One way or another we're all looking to give these early machines and their creators their rightful place and recognition in this history." Yes!
As you notice, I had forgotten some key names for the moment. I have a lead on my Virginia Tech co-op buddy Ed Dean. It's been too long…———————————————
The boom head end looks like they did some more work on it, too.The ultrasonic 40 kHz transducers were the same ones used for Zenith TV remote controls at the time. My buddy Ed Dean did the basic design when he was in the group before me and I finished it on my text tour after he left to finish his senior year at Virginia Tech.
The sonar guidance was used to guide Mod II down the center of the hallway when it was not in power search mode and to detect and avoid obstacles like people.
For now just an inventory of my APL robot folder…
There are APL documents, internal memos and public (?) articles, and articles from magazines and newspapers. I will only list the APL documents with a note or two about each. I'm leery about scanning them now, not knowing their status. Helen may be able to release them. You _may_ be able to obtain copies of the magazine articles, knowing the dates. If not, I can scan them. I doubt you can obtain the newspaper articles, so I will scan those.
=====================================
APL-JHU documents
==================
Publications:
============
Adaptive Machines
APL News (internal newsletter), 1964 March,
pages 6, 7 & 8 with 3 photos
The Mobile Automaton
APL Technical Digest (magazine distributed outside)
1962 Sep.-Oct, pages 15-16, with 3 photos of Mod I
Memoranda
=========
Adaptive Machines at the Applied Physics Laboratory
maybe by John Chubbuck, probably a publicity handout
about 1963, two pages, talks about Mod II, no photos
The Objective of the CLM Group
L. M. Spetner, L. J. Viernstein, J. G. Chubbuck
APL technical memo CLM-25, 1960 Nov 17
– 3 pages
– indicates robot project started about two years before
– Mod I apparently not started at this time
An Approach to the Artificial Intelligence Problem
L. M. Spetner
APL technical memo CLM-26, 1960 Nov 22
– 2 pages
– says that conscious behavior is not practical (in 1961
and automatic behavior is necessary
Mobile Automata Hall-Roaming
L. M. Spetner
APL technical memo CLM-45, 1961 Sep 22
– 6 pages
– discusses feasibility of NOR gate logic control
Logic for Mod II Mobile Automata
L. M. Spetner
APL Technical CLM-55, 1962 Sep 07
– 30 pages
– describes lessons learned from Mod I and improvement for Mod II
Mod II Automaton Logic
J. R. Jacques
APL technical memo CLM-59, 1962 Oct 23
– 24 pages
– logic control for Feeding, Obstacle and Maneuver Mode, Boom
and Wheel Control, Acoustic and Speed Mode
Addition to the Automaton Logic of CLM-59
J. R. Jacques
APL technical memo CLM-63, 1962 Dec 13
– 8 pages
– additions and revisions for Mod II logic
A Comparison Between Digital and Analogue Control of Automata
L. J. Viernstein
APL Technical memo CLM-62, 1962 Dec 10
– advocates some continuous function control
Continuous Control of Mod III Automaton
J. Durkovic
APL technical memo CLM-96, 1964 Aug 10
– 14 pages
– describes a continuously controlled automaton per CLM-62
Mod IV Automaton Proposal
J. G. Chubbuck
APL technical memo CLM-108, 1964 Nov 17
-12 pages
– describes basic functions of underwater automaton
Behavioral Logic for an Underwater Automaton
J. G. Chubbuck
APL technical memo CLM-113, 1965 Mar 26
– 34 pages
– describes needed capabilities for underwater
search and mapping missions
=====================================
Newspaper articles
=============For now, I am just including the list of magazine articles that I have. Newspapers next time.
I found a page of my own handwritten notes from Sep. 15, 1964 on "Mod IV, (V, VI, ?) Vehicle, Robot Sub" about purposes, frame, location sense, communications payloads, …I'm not sure now how much of this was my own and how much came from talking with John Chubbuck.
Attached:
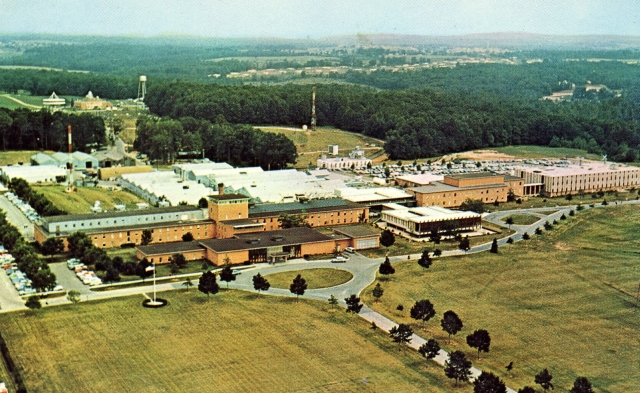
Postcard of the APL buildings in Scaggsville, MD from about 1964. The robot lab was in the basement in the back of the main building, toward the left as seen from the front. View is toward the north in the direction of Baltimore. APL headquarters are(?)/were in Silver Spring, MD. The Scaggsville location now uses Laurel, MD as its official address, a town which is a few miles southeast.I was just noticing on the APL web site the other day that they use JHU-APL, where I have always used APL-JHU, I think. … Yeah, the Technical Digest used "Applied Physics Laboratory, Johns Hopkins University."
====================
Magazine articles
===============
The machine that plugs itself in
Science Digest, August 1964,
pages 61, 62 with two photos
plus a photo on back cover
– good article on Mod II
– original copy, good condition==========
The Robot That Feeds Itself
J. Sienkiewicz
Radio-TV Experimenter
October 1964, pages 98-99,
one paragraph with 8 photos of Mod II
– original copy, good condition========
Machine "Thinks" for Itself
Elizabeth Hall
Science News Letter, March 14, 1964,
pages 170-171, with one photo,
– good article
– original copy, good condition=========
'Beast' Hears Like Bat
Science News Letter, August 8, 1964,
page 87, one photo with text and full front cover photo
– good article, uses "Beast"
– poor copy====
A Visit With Mod II
MI at Large column
Mechanix Illustrated, June 1964
page 14-17, one photo,
– good article on Mod II, first use of "Beast" ?
– original copy, good condition===========
La Dynastie des Ferdinand Robots Evolues
Science et Vie, June 1964,
page # not seen, one photo
– French (I should try an OCR scan and run it through
a translator. My once semi-decent technical French
reading skills have faded.)
– poor copy==========
[Jumping to the “Future”]
Wanted: a robot that think for itself
John F. Mason, Associate Editor
Electronic Design, June 12, 1976,
pages 66, 68, 71
– good article describing the potential uses
of undersea and interplanetary mobile automata,
from JPL programs,
no mention of APL work.
– original, good conditionRobot project arouses envy from a pioneer
Ronald C. McConnell
Across the Desk (letters to the editor) column,
Electronic Design, August 2, 1976, pages 7, 8,
– my response to "W: a r t t f I" outlining APL robot project
and how JPL had visited APL
– original, good condition=======
Related article
Navy Declassifies Details of Pigeon Guidance Project
40 Years Ago in Electronic Design column
Steve Scrupski, former editor
Electronic Design, Nov 22, 1999, page 34,
– refers to a Nov 25, 1959 article describing
George Carlton's "pigeon-pecking missile
guidance project in the late 1940s.
George headed the APL robot project 20 years later.
——————————–By coincidence I discovered yesterday
that I did record the History Channel
"Modern Marvels" episode
that shows Mod II scurrying about for a few seconds.
……………My next task is to inventory the newspaper articles.
I suspect that those will not be easy to find
and that I will need to copy them.
They are make up a much smaller stack of paper
than the APL memos.=====================================
APL-JHU documents==================
Publications:
============
Adaptive Machines
APL News (internal newsletter), 1964 March,
pages 6, 7 & 8 with 3 photos
The Mobile Automaton
APL Technical Digest (magazine distributed outside)
1962 Sep.-Oct, pages 15-16, with 3 photos of Mod I
Memoranda
=========
Adaptive Machines at the Applied Physics Laboratory
maybe by John Chubbuck, probably a publicity handout
about 1963, two pages, talks about Mod II, no photos
The Objective of the CLM Group
L. M. Spetner, L. J. Viernstein, J. G. Chubbuck
APL technical memo CLM-25, 1960 Nov 17
– 3 pages
– indicates robot project started about two years before
– Mod I apparently not started at this time
An Approach to the Artificial Intelligence Problem
L. M. Spetner
APL technical memo CLM-26, 1960 Nov 22
– 2 pages
– says that conscious behavior is not practical (in 1961
and automatic behavior is necessary
Mobile Automata Hall-Roaming
L. M. Spetner
APL technical memo CLM-45, 1961 Sep 22
– 6 pages
– discusses feasibility of NOR gate logic control
Logic for Mod II Mobile Automata
L. M. Spetner
APL Technical CLM-55, 1962 Sep 07
– 30 pages
– describes lessons learned from Mod I
and improvements for Mod II
Mod II Automaton Logic
J. R. Jacques
APL technical memo CLM-59, 1962 Oct 23
– 24 pages
– logic control for Feeding, Obstacle and Maneuver Mode,
Boom and Wheel Control, Acoustic and Speed Mode
Addition to the Automaton Logic of CLM-59
J. R. Jacques
APL technical memo CLM-63, 1962 Dec 13
– 8 pages
– additions and revisions for Mod II logic
A Comparison Between Digital and Analogue Control of Automata
L. J. Viernstein
APL Technical memo CLM-62, 1962 Dec 10
– advocates some continuous function control
Continuous Control of Mod III Automaton
J. Durkovic
APL technical memo CLM-96, 1964 Aug 10
– 14 pages
– describes a continuously controlled automaton per CLM-62
Mod IV Automaton Proposal
J. G. Chubbuck
APL technical memo CLM-108, 1964 Nov 17
-12 pages
– describes basic functions of underwater automaton
Behavioral Logic for an Underwater Automaton
J. G. Chubbuck
APL technical memo CLM-113, 1965 Mar 26
– 34 pages
– describes needed capabilities for underwater
search and mapping missions
Later Models:
As can can seen in the bibliography above, there were other automatons built or proposed.
A third automaton more closely resembles the human nervous system in that it relies on artificial neurons for sensing its surroundings. The continuous sensors in this machine result in smoother movements instead of the jerky banging action of the other two. The first two machines are composed of standard electronic equipment similar to the logical basis of a computer. But unlike a computer, these machines receive many inputs or sensations all the time and must sort through them and decide on a course of action.
John G. Chubbuck together with Harold R. Bittner actually patented the artificial neuron. Patent No. 3277315.

Mod IV was to be an underwater automaton.