
Here is the Otherlab’s 15 foot inflatable walking robot, the Ant-Roach. We thought this conceptual elephant looked more like a cross between an anteater and a cockroach. The goal of building the Ant-Roach was to demonstrate the carrying capacity and high strength-to-weight ratios possible with inflatable structures.

Comments November 21, 2011 by Travis Deyle of Hizook – see original article here.
"I'm really excited about inflatable robots… they have the potential to be low-cost, lightweight, extremely powerful, and yet "human safe" — ie. perfect for many robotics applications. With that in mind, I would like to introduce you to two new (breakout) inflatable robots: a 15-foot-long walking robot (a Pneubot named Ant-Roach) and a complete, inflatable robot arm (plus hand). Both of these robots were developed by Otherlab as part of their "pneubotics" project (in collaboration with Meka Robotics and Manu Prakash at Stanford University), with some funding from DARPA's Maximum Mobility and Manipulation (M3) program. These robots use textile-based, inflatable actuators that contract upon inflation into specially-designed shapes to effect motion. Since these robots are built out of lightweight fabric-and-air structural members and powered via pneumatics or hydraulics, they exhibit large strength-to-weight ratios. For example, Ant-Roach is less than 70 lbs and can probably support up to 1000 lbs; the inflatable robot arm is less than 2 lbs and can lift a few hundred pounds at 50-60 psi. Be sure to read on for details and lots of videos!"

Picture above shows Pete Lynn hefting the whole thing.

The muscles are textile-based actuators which contract upon inflation. The picture above shows a stack of them during construction.
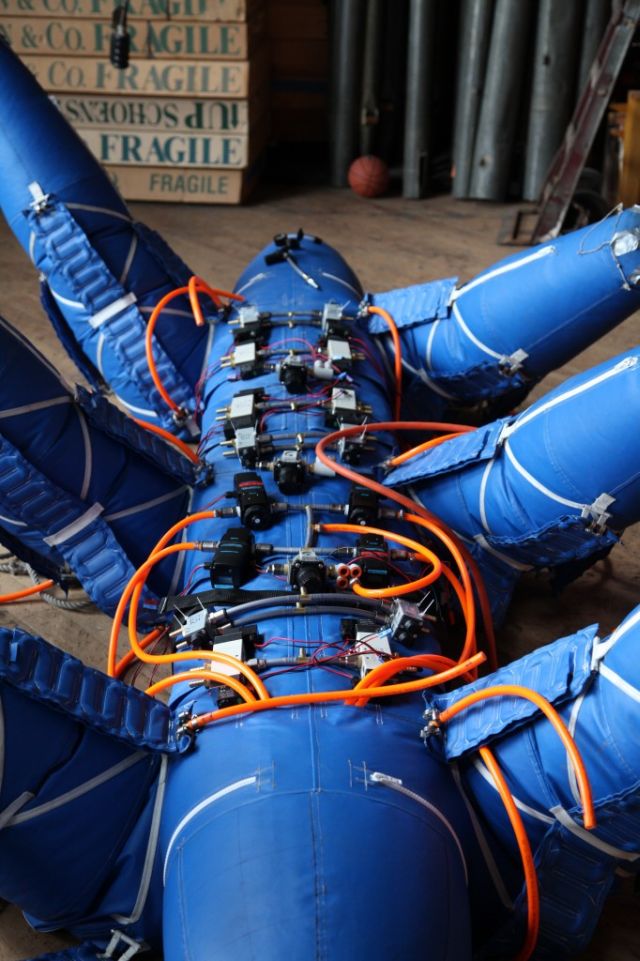
The muscles are driven from several central manifolds which dispense compressed air.
All pictures and captions sourced from Otherlabs webpage unless noted otherwise. See Otherlabs webpage and other videos here.
See other Pneumatic, Fluidic, and Inflatable robots here.