University of Wisconsin-Madison Mechanical Engineering Professor Ali Seireg achieved worldwide recognition for his work in mechanical and biomedical engineering design. Among his advances, he was first to develop a mathematical model of the entire human musculoskeletal system that could predict the muscle and joint forces and interactions, given a motion input. In the early 1970s, he performed pioneering research on using powered exoskeletons to help disabled people rehabilitate and walk. Here are a few iterations of Seireg's "walking machines," and his demonstration of their use.
Ali Seireg was the supervising Professor, but the exoskeleton was built by Jack George Grundmann.
Source: The Wisconsin Engineer – Volume 77, Number 2 (November 1972)
Everyone Should Walk by Steve Sanborn
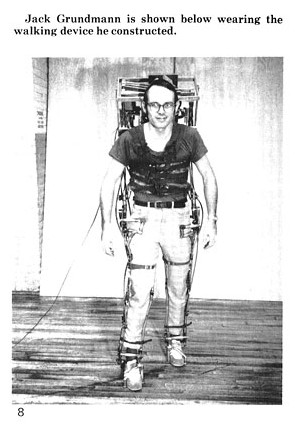
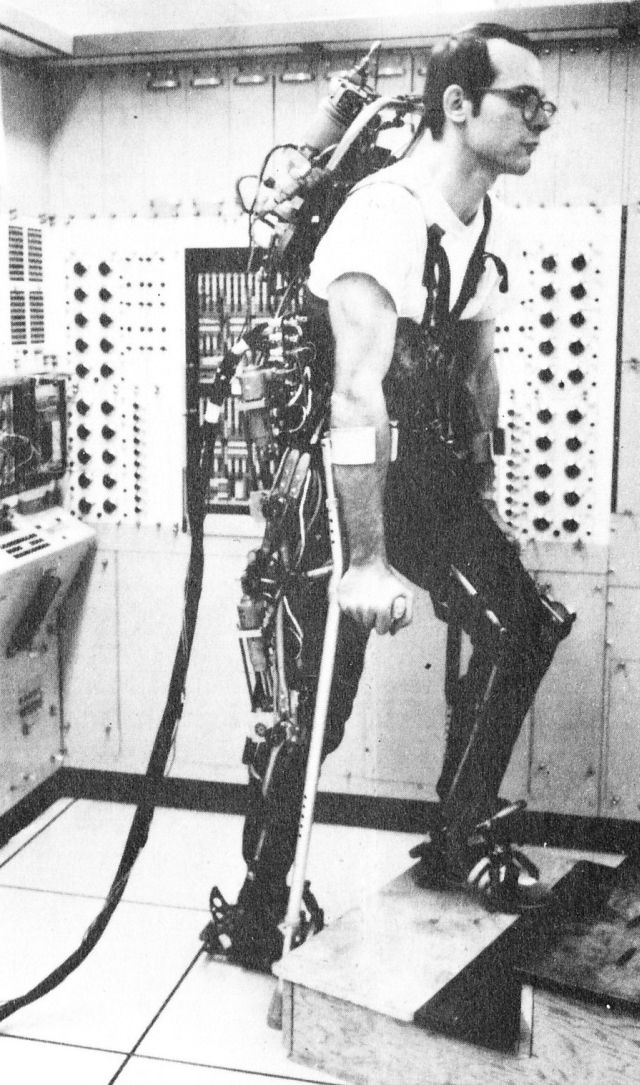
Caption: Jack Grundmann is shown above wearing the walking device he constructed under the guidance of Prof. Seireg of the Mechanical Engineering Department.
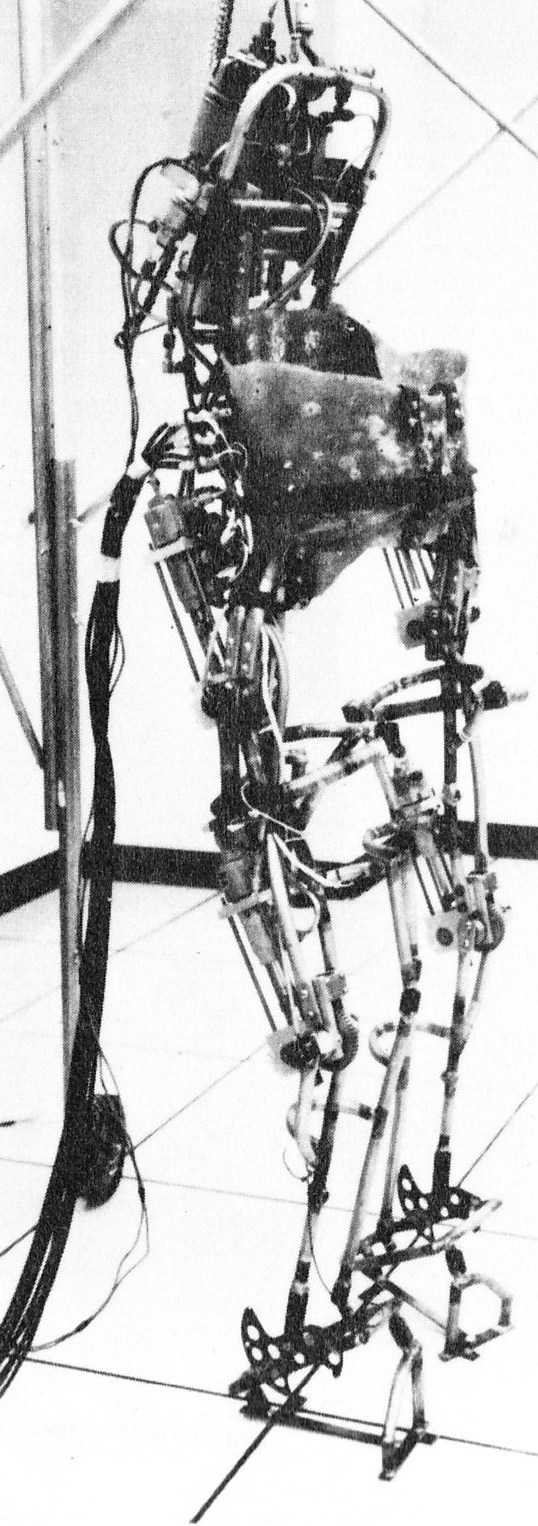
During the 1971 Engineering Exposition people on this campus were exposed for the first time to a walking device. This device was a three legged robot powered by compressed air. Actually it was not a complete robot but only the walking portion, just the legs.
The mechanism was constructed to be a model, a mechanical analog of a walking human. It could have been built with only two legs rather than three, but since it weighed 260 pounds it would have damaged easily if tipped over. The third leg provided extra stability.
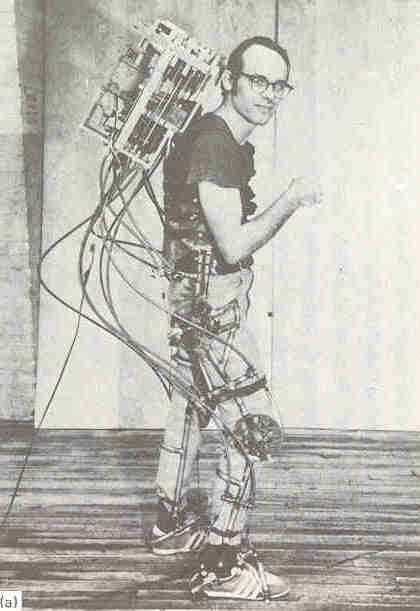
Since this original prototype was constructed, a new two legged model has been built. The new model differs considerably from the prototype in many respects. The two legged model is powered by AC current rather than compressed air. Unlike the prototype, the present model is actually worn by a human. This was the goal of the design project, to create a device that would give a person that was unable to use his legs, the ability to walk again. The project is by no means completed. More work has to be done in designing and constructing the third model. Presently Jack Grundmann is testing and altering the second model so as to incorporate new ideas into the third mechanism.
As was mentioned, the first prototype was operated with compressed air. This model was consequently bulky and awkward. Model II is operated by what is described as a puppet system. Cables extend from cams, located in a pack, down the body to the individual joints in which they control. The pack is mounted
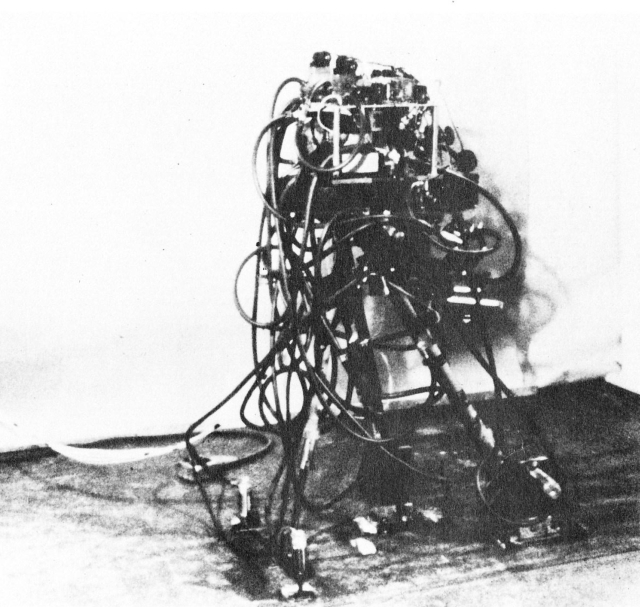
Caption: Shown above is the original three legged walking machine.
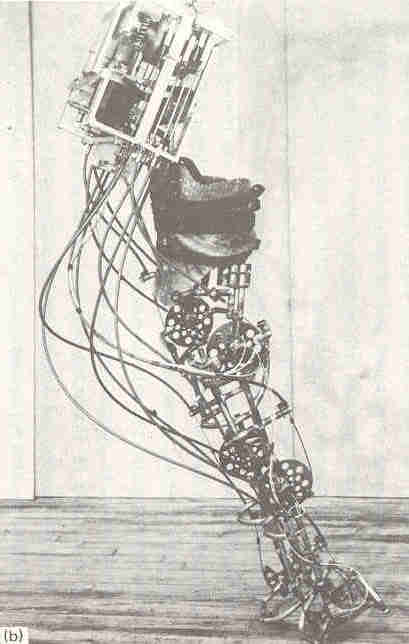
Caption: This side view shows the long cables extending from the cams in the pack to the joints of the device.
on the shoulder of the person wearing the mechanism. Supports extend from the frame of the mechansim to the pack so that the heavy weight of the device is not felt by the wearer. Within the pack are the six cams that pull the cables causing the person to walk. These cams were designed to cause the joints to move almost exactly the way a normal human moves.
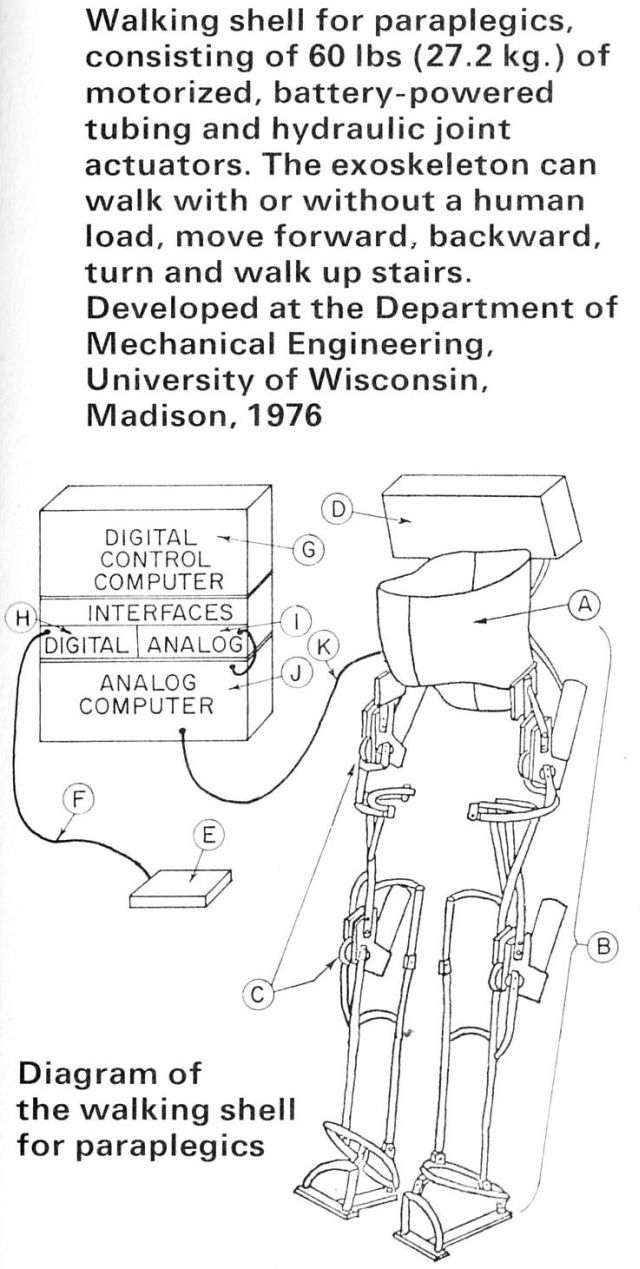
Ultimately it is desired to make a system that will allow a person that can no longer use his legs to walk forward, backward, turn, sit, stand and walk up and down stairs. Also, the device should be cosmetic. This means that it should be possible to cover the mechanism and its suspension system with normal clothing apparel.
Model II can only walk forward, Model III will be able to preform all these tasks. Model III will not be supported by bulky metal braces and tubes as were previous models. Instead, plastics and fiberglass will be incorporated as structural supports. To replace the bulky joints, electronic servo mechanisms will be employed. The use of electronics will allow a number of mini-programs to be place in a very small computer, carried by the person using the device. Each program would cause the mechanism to move, initating the motions a human makes. The programs would be turned on and off by the person wearing the device. There would be one program for each sequence of movements such as walking or for sitting.
Very little has been done in the past three centuries in the area of prosthesis. The plastic leg of today is nothing more than an adaptation of the wooden leg of the seventeenth century. It is unfortunate that the technology of today has not been applied sooner to help paralized people walk again.
This attempt at the University of Wisconsin College of Engineering requires the encouragement and support of all people concerned with restoring the ability to walk to those who can not.
Mk III
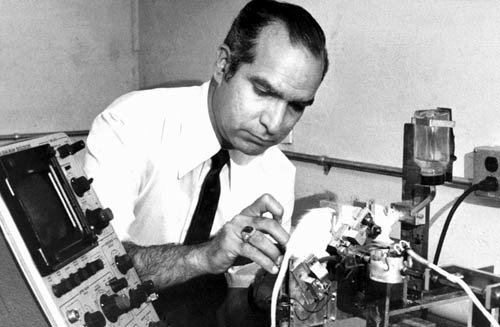
Kaiser Chair of Mechanical Engineering Ali Seireg was best known for his research on biomechanics, or treating the human body as a machine. He taught in the College of Engineering for 31 years before his retirement in 1997 and maintained a presence on campus until his death in 2002. He authored seven books and more than 300 papers, edited two journals for the American Society of Mechanical Engineers, and created a “walking-machine” for paraplegics, which was exhibited at the Seattle World’s Fair and the History of Medicine and Science Museum in London. He was an award-winning educator and internationally recognized engineer.
See other early Teleoperators, Exoskeletons and Industrial Robots here.
One Reply to “1971 – A computer controlled multi-task powered exoskeleton for paraplegic patients – Jack George Grundmann / Ali Seireg (American)”
Comments are closed.