SERVO 01.2004
Vintage
Anthony Ellis, Conceptioneer (inventor / product developer, www.appliedmachineintelligence.co.uk) is the trailblazing roboticist behind our first modern robot from the past.
If you're new to robotics, or haven't kept up with news from across the pond, you probably haven't heard of this "vintage" robot. Meet Anthony Ellis' 23-year-old creation, appropriately named Vintage.
Vintage came to life in 1981 [RH- 1979 from another source], in Ellis' home in Mitcham, Surrey, England.
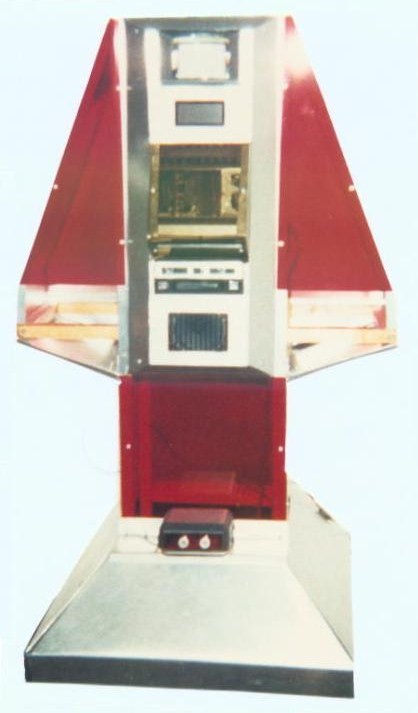
The robot's body was aluminum sheeting over a wooden subframe. It stood about five feet tall, bigger than most state-of-the-art robots. Though Ellis couldn't confirm the exact price tag, Vintage cost a small fortune in British pounds to piece together.
The Concept
Vintage was loosely based on the Droids in the movie "Silent Running" (1972). As with many amateur robots (and not unlike Frankenstein's monster), Vintage was one-of-a-kind, a prototype with no production model. Ellis had to acquire many new skills to complete him.
Programming
Vintage learned by doing. Fully programmable, he was remote controlled (based on tone decoding). Tones were fed to Vintage, which triggered his responses. The tones were simultaneously recorded to cassette. The tape was played back from a player in the robot's belly (which was taken from a car stereo). Vintage followed commands from the tape, as well as manually.
Eventually, tone sequences and voice were both recorded to tape (by splitting stereo channels). The robot could then be programmed to speak at
times that coincided with specific movements. Vintage was capable of a variety of activities, using each of his moving parts, including his arms and claws.
These arms and claws emerged from the front casing, just as they did on the Silent Running Droids. The arm mechanisms were worm driven, moving the mechanical appendages from a vertical position, parallel with the body, to a horizontal position, away from the body.
Vintage could carry a tray and drink glass to a designated position where a participant would be waiting, and say, "Your drink, Sir." The tape would stop until the drink left the tray, then the robot would move back to its starting position.
"Warning, Warning! Danger, Danger!"
On one occasion, the tape player malfunctioned. Vintage careened uncontrollably around the room, in wild, random motions — a machine out of control!
He toppled furniture and damaged the room. Because the ultrasonics were down so that Ellis could work on the robot, it couldn't evade collisions.
There was no override switch and, due to the malfunction, the radio frequency (RF) link wasn't available to shut the robot down. Ellis had to chase him until he could remove the rear access panel and pull a battery lead.
Due to an earlier problem, most of the above text didn't make it into this post. Tony Ellis has since offered the following description: [16 June 2010]
<< This is the first robot that I ever built, it must have been around the late seventies. Servo magazine, did a piece on this a few years back. It was programmed using tones (decoded by PLL chips) playback by cassette player. Note the early ultrasonic ranger, the first I ever designed!
This full sized robot was heavy and ran off a heavy duty car battery. It was before microcontrollers and I wanted to program it to do simple stuff, so I built a car stereo player into the front of the machine. I then built a 16 channel RC system based on sending audio tones that a bank of NE567 PLL chips decoded. The system was first started from a know point "Robot cubby hole" then sending the tone commands (via radio) over to the robot (tone1 = forward, tone5 = left arm up etc). At the same time, these tones (and the duration of the tone) was recorded on one channel of the stereo cassette, I used the other channel to record speech at certain parts of the playback. So when programming the robot, you first took it through the sequence that you wanted it to do later, then when finished, put the robot back at the start position, rewind the cassette and insert it into the robot who would now follow all the original tone commands. >>