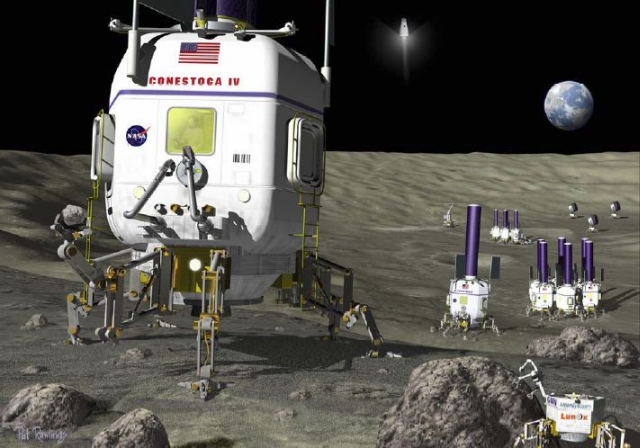
Pat Rawlings’ Rendering of the “Habot” Mobile Lunar Base Concept (courtesy of John Mankins, NASA HQ, and Neville Marzwell, Jet Propulsion Laboratory).
Mankins’ Habot
John Mankins introduced the Habitat Robot concept, “Habot,” in 2000 as a radical departure from traditional lunar base studies. The strongest attribute of the Habot is its “small is beautiful” emphasis. The Habot modules land on six articulated legs, and then takes double advantage of the legs by using them to walk away robotically from the landing zone. The pressure vessels are hexagonal insofar as they require three cross-axes separated equally at 60°of arc. They cluster together automatically to form a temporary base. The possible module size ranges from about 3 to 5m diameter. The crew arrive and depart the surface of the moon in a separate Descent/Ascent vehicle that may share some hardware commonality with the Habot units, but is optimized for transporting the crew through cislunar space, landing and taking off from the lunar surface. With self-ambulating lunar base modules, it would be feasible to have each module separate itself from its retro-rocket thruster unit, and walk five to ten km away from the LZ to a pre-selected site. These walking modules can operate in an autonomous or teleoperated mode to navigate the lunar surface. At the site of the base, the walking modules can combine together; make pressure port connections among themselves, to create a multi-module pressurized lunar base. FIGURE 2 presents an artist’s rendering of the Habot concept, showing both a hexagonal Habot cluster base, and Habot rovers moving about the lunar surface, driven by astronauts. A peculiar power source appears in the form of the cylinders mounted atop each Habot, which mount photovoltaic cells to provide power during the 14 sol lunar day. With exposed joints, the articulated legs would be vulnerable to dust and grit in the mechanisms, so the legs would need to be covered with dust-tight “stockings”.
“WAGON TRAIN” CONCEPTS
The “Wagon Train” was an American pioneering technique in which a group of ox-drawn onestoga wagons traveled together in line. When they stopped for the night, they would “circle the wagons” to form a temporary base cluster. The Habot concepts draw upon various aspects of the wagon train paradigm.
Habot
Source: Encyclopedia Astronautica
Habot, manned lunar rover. Study 2000. The Habot (Habitat Robot) modules would land on six articulated legs, which also provided the locomotion. These walking modules could operate autonomously or in a teleoperation mode.
The modules could be combined to form a multi-module pressurized lunar base.
Each module was up to 5 m diameter with a mass of 10 metric tons. The pressure vessels had hexagonal shapes to allow clustering with other units. Photovoltaic cells on the top of the modules produced the power required during the lunar day (14 earth days). Movement would only be conducted during the lunar day. The units would cluster and remain stationary at minimum power levels for the lunar nights. A crew of 6, using several Habot units, could be accommodated on a 100 day lunar mission.
Characteristics
Crew Size: 6.
Gross mass: 10,000 kg (22,000 lb).
Height: 5.00 m (16.40 ft).
Diameter: 5.00 m (16.40 ft).
Bibliography
Zakrajsek, James J; McKissock, David B; Woytach, Jeffrey M; Zakrajsek, June F; Oswald, Fred B; McEntire, Kelly J; Hill, Gerald M; Abel, P; Exploration Rover Concepts and Development Challenges, NASA/TM-2005-213555 / AIAA-2005-2525, March 2005.