Russian Walking Machines from Dept. of Theoretical Mechanics.
All source material from here.
![]()
Now tens of scientific groups in the world are developing this problem. Walking machines can be divided into two parts: dynamical stability (with a few legs) and statical stability (multilegged) machines. The letter can be divided into vehicles of profile practicability and vehicles of ground practicability. The vehicles of ground practicability can be used for moving on relatively flat terrain and on the soils with poor carrying layer (sand, marshland, poor earth road), also on the soils with ecologically injured layer (tillage, tundra, permafrost).
One of perspective directions of research work in this field is developing of the simplest plantigrade vehicles. The walking machines designed in the department of theoretical mechanics of VSTU are of this type.
Now we developed several pre-production models of walking machines:
Walking Support for Sprinkling Machine "Kuban"
Transport Walking Machine.
Walking Transport-Technological Mobile System.
This work is executed at financial support of the Russian Fund of Basic Researches (grant 99-01-01242, 02-01-06447, 02-01-15000к) and grants of Ministry of education of the Russian Federation: "Research activities of the higher institutes in the field of the transport", "Research activities of the higher institutes in the field of the industrial technologies".
Some of results of this work described in the following papers:
БриÑкин Е.С., Соболев Ð’.Ðœ. ТÑÐ³Ð¾Ð²Ð°Ñ Ð´Ð¸Ð½Ð°Ð¼Ð¸ÐºÐ° шагающих машин Ñ Ð¾Ñ€Ñ‚Ð¾Ð³Ð¾Ð½Ð°Ð»ÑŒÐ½Ñ‹Ð¼Ð¸ движителÑми// Проблемы машиноÑÑ‚Ñ€Ð¾ÐµÐ½Ð¸Ñ Ð¸ надёжноÑти машин, 1990. — N 3.— С. 28–34.
Проблемы раÑчёта и Ð¿Ñ€Ð¾ÐµÐºÑ‚Ð¸Ñ€Ð¾Ð²Ð°Ð½Ð¸Ñ ÑˆÐ°Ð³Ð°ÑŽÑ‰Ð¸Ñ… машин грунтовой проходимоÑти. БриÑкин Е.С., Вавилин Г.Д., Голицин И.Ð’. и др. Доклады научной школы — конференции "Мобильные роботы и мехатронные ÑиÑтемы". — Ðœ.: ИнÑтитут механики МГУ, 1999. С. 124–153.
БриÑкин Е.С., Чернышев Ð’.Ð’., ШерÑтобитов С.Ð’., Малолетов Ð.Ð’. и др. Об ÑнергетичеÑкой ÑффективноÑти, маневренноÑти, вибронагруженноÑти и управлении шагающими машинами грунтовой проходимоÑти // Доклады научной школы — конференции "Мобильные роботы и мехатронные ÑиÑтемы" (Ñ Ð¼ÐµÐ¶Ð´ÑƒÐ½Ð°Ñ€Ð¾Ð´Ð½Ñ‹Ð¼ учаÑтием) МоÑква, ИнÑтитут механики МГУ, 1999.— С. 89-108.
БриÑкин Е.С., Чернышев Ð’.Ð’. ÐкÑпериментальные иÑÑÐ»ÐµÐ´Ð¾Ð²Ð°Ð½Ð¸Ñ Ð´Ð¸Ð½Ð°Ð¼Ð¸ÐºÐ¸ многоопорной шагающей машины Ñ Ð´Ð²Ð¸Ð¶Ð¸Ñ‚ÐµÐ»ÐµÐ¼ лÑмбдаобразного типа // ИзвеÑÑ‚Ð¸Ñ Ð²ÑƒÐ·Ð¾Ð². МашиноÑтроение. 1999, â„–4. С. 32-37
ОÑобенноÑти ÑƒÐ¿Ñ€Ð°Ð²Ð»ÐµÐ½Ð¸Ñ Ð¸ Ñтабилизации Ð¿Ð¾Ð»Ð¾Ð¶ÐµÐ½Ð¸Ñ ÐºÐ¾Ñ€Ð¿ÑƒÑа многоногих ÑтатичеÑки уÑтойчивых шагающих машин /Чернышев Ð’.Ð’., БриÑкин Е.С., Буданов Ð’.Ðœ., ДевÑнин Е.Ð., Жога Ð’.Ð’., Малолетов Ð.Ð’., Тельдеков Ð.Ð’., ШерÑтобитов С.Ð’., Дудкин Ð.Г. //Мобильные роботы и мехатронные ÑиÑтемы: Мат. науч. шк.–конф., МоÑква, 5–6 дек. 2000 г. /Под. ред. ФормальÑкого Ð.Ðœ., Буданова Ð’.Ðœ.; МГУ.—Ðœ., 2000.—С.256–273.
Briskin E.S., Chernyshev V.V., Maloletov A.V., Sherstobitov S.V. On Dynamics of Movement of Walking Machines with Gears on the Basis of Cycle Mechanisms//Theory and Practice of Robots and Manipulators — ROMANSY 13 : Proc. of the 13-th CISM-IFToMM Symposium /International Centre for Mechanical Sciences. Wien; New York, 2000.—P.44–48.
Walking Support for Sprinkling Machine "Kuban"
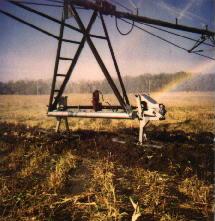
Walking Support for Sprinkling Machine "Kuban" designed in 1995 year.
Research team:
Scientific supervisor: Briskin E.S.
Main designer: Cherkasov V.V.
research assistants: Zhoga V.V., Rusakovsky A.E., Sherstobitov S.V.
Characteristics:
Weight 495 kg
Length of the machine 4,6 m
Potency of a drive 1 kW
Peak load 2,5 t
Ground pressure 0,32 kg/cm2
Walking Transport-Technological Mobile System

Walking transport-technological mobile system designed in the autumn of 1998 year. We tested the machine in 1999-2000 years.

Still from video here.


Surface of swamp cleaning with use a sorbent that is created in institute of industrial ecology of VSTU (1999 year).

Sewage disposal plant of nitric-oxygen factory (2000 year).
Research Team:
Scientific supervisor: Briskin E.S.
Main designer: Sherstobitov S.V.
Main designer of the manipulator: Gerasun V.M.
Designer of the manipulator: Rogachev A.F.
Engineer of control system: Golytsyn I.V.
Research assistants: Chernyshev V.V., Zhoga V.V., Maloletov A.V., Teldekov A.V.
Characteristics:
Weight 1620 kg
Length of the machine 4,6 m
Breadth 2,8 m
Weight of the moved consignment 3500 kg
Potency of a drive 12 kW
Maximum velocity 0,267 m/s
Ground pressure under full loading of machine 0,32 kg/cm2
Height of overcome obstacles 0,18 m
Breadth overcome of the ditches 0,7 m
Practicability swamp, sand ets.
Lifting capacity of the manipulator 1,5 t
Transport Walking Machine

Transport walking machine designed in 1997 year. The machine consists of two walking supports like as walking support for sprinkling machine "Kuban" and central frame. Also the machine have isolated micro generating plant.
We tested the machine on a difficult region near town Dubovka of the Volgograd's province. The machine can overcome a swamp (0.6 metres deep) and a rise (30 degrees).
Research team:
Scientific supervisor: Briskin E.S.
Main designer: Sherstobitov S.V.
Engineer of control system: Golytsyn I.V.
Preparation of the test procedure, realization of tests, processing of results: Chernyshev V.V.
Research assistants: Zhoga V.V., Rusakovsky A.E., Cherkasov V.V., Kuznetsov S.A., Maloletov A.V.
Characteristics:
Weight 1620 kg
Length of the machine 4,6 m
Breadth 2,8 m
Weight of the moved consignment 3500 kg
Potency of a drive 4 kW
Maximum valocity 0,267 m/s (0,97 km/h)
Ground pressure under full loading of machine 0,32 kg/cm2
Height of overcome obstacles 0,18 m
Breadth overcome of the ditches 0,7 m
Practicability swamp, sand ets.



Another similar Russian or Soviet walking machine.