Dante:



In 1992 a walking robot named Dante1 was designed and built at Carnegie Mellon University. Using a tensioned tether, Dante can ascend and descend steep slopes. It is designed to rappel into and explore active volcanic craters. The Dante project was an ambitious attempt to proceed, in 10 months, from idea to implementation. The culmination was an expedition to an active volcano, Mount Erebus, in Antarctica.
In terms of robot science, the objectives were to demonstrate a real exploration mission, rough terrain locomotion, environmental survival, and selfsustained operation in the cold, windy, bright, rugged Antarctic environment. The expedition to Mount Erebus was indeed a real mission. Dante climbed into the steep sided crater, surviving the environment and operating in a self-sustaining manner until the failure of a critical component, the communications tether, necessitated rescue and the premature termination of the crater exploration. The volcano science objectives were also real and involved the study of Mount Erebus’ unique convecting magma lake. Dante was equipped with instruments to determine the chemical and isotopic composition of gas generated by the volcano’s magma lake, to measure the radioactivity of materials near the lake and to measure the temperature of the magma itself.
Dante can rappel up and down steep slopes and surmount obstacles as large as 1 meter in height. It can perceive and model the terrain around it using a scanning laser rangefinder and a trinocular camera system. Its planning software determines safe paths and adjusts the gait to avoid obstacles. While some of its computers reside off-board at a base station and are linked via a fiber optic cable, Dante is computationally self-sufficient, able to chart its own course, react to perceived terrain, and acquire data from science payload sensors. Dante’s eight pantographic legs are organized in frames of four—an inner frame and an outer frame—with each coupled through a drivetrain that provides an intrinsic walking motion. To walk, four legs simultaneously lift and reach forward while the other four supporting legs propel the body. Each of the legs can individually adjust its height to avoid obstacles in the terrain. On steep slopes the tensioned tether provides a reactive force to gravity, assists in maintaining equilibrium, and allows Dante to rappel like a mountain climber.
1. The robot is named Dante in reference to the poem, The Divine Comedy by Dante Alegheri, in which Dante travels to the underworld. Erebus is a cloud of mist that obscures the entry to hell. Early mission scenarios also had a transport robot named Virgil for the Roman poet who guides Dante during his quest. In keeping with the theme, the cart used to carry Dante around is called Geryon after a flying daemon who gave Dante a lift.
See Dante pdf here.
See Electronics Australia Jan 1994 article here  .
.
Dante II:


![]()
![]()


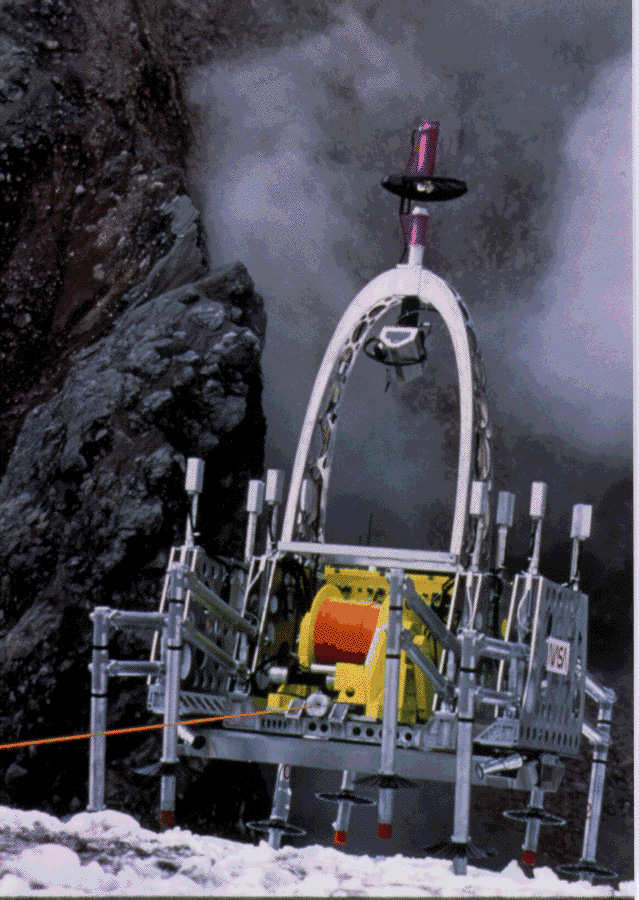
The CMU Field Robotics Center (FRC) developed Dante II, a tethered walking robot, which explored the Mt. Spurr (Aleutian Range, Alaska) volcano in July 1994. High-temperature, fumarole gas samples are prized by volcanic science, yet their sampling poses significant challenge. In 1993, eight volcanologists were killed in two separate events while sampling and monitoring volcanoes. The use of robotic explorers, such as Dante II, opens a new era in field techniques by enabling scientists to remotely conduct research and exploration.
Using its tether cable anchored at the crater rim, Dante II is able to descend down sheer crater walls in a rappelling-like manner to gather and analyze high temperature gasses from the crater floor. In addition to contributing to volcanic science, a primary objective of the Dante II program is to demonstrate robotic exploration of extreme (i.e., harsh, barren, steep) terrains such as those found on planetary surfaces.
Dante II Technical Information
Overall
•Type: Eight-legged rappelling frame walker
•Manufacturer: Field Robotics Center, Carnegie Mellon University
•List price: $1,700,000 (destination charges not included)
General Data
•Length: 120 in. (up/downhill)
•Width: 85 in. (cross-slope)
•Height: 120 in. (includes sensor mast)
•Tether: 1000 ft. (length), 0.45 in. (diameter)
•Weight: 1700 lb.
•Leg type: 4x pantograph
Performance
•Speed: 1 m/min.
•Stride: 45 in. (single-step)
•Max. turn: 11 deg. (single-step)
•Max. obstacle clearing: 50 in.
•Max. rapelling distance: 1000 ft.
•Temp. range: 0 to 100 degrees F
Sensors
•Leg: position (0.1 in. resolution), axial force (0 to 3000 lb at pantograph mount)
•Tether: tension (0 to 3000 lb.), exit angle (-90 to 90 degree, two-axis), payout (30 cm resolution)
•Body: Two-axis inclinometers (0.1 degree, pitch & roll)
•Single gas sensors: H2S, SO2, CO2
•Temperature: thermocouple (foot mounted), ambient
•Cameras: Color stereo pair (pan/tilt mounted), Color zoom (pan/tilt mounted), Kodak DCS-100 digital 35mm camera (pan/tilt mounted), Four leg view cameras (bottom frame mounted)
•Scanning laser rangerfinder
Computing & Electronics
•Computing: VME single board computers (Sparc, M68030's), VxWorks operating system
•Power: 3A at 1000VAC (peak), 2 KW (nominal)
•Two VTEL video codecs
•1024 Kbit/sec satellite link (includes 192 Kbit/sec TCP/IP, two 384 Kbit/sec digital video) 01/08/2012 00:51:22
See list of Dante II pdf's here.
See 1min 45sec into video clip to see Dante II. Thanks to David Buckley for locating this for me.
this was very helpful for my eloctro tech class thank you for posting this