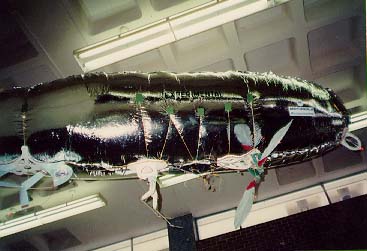
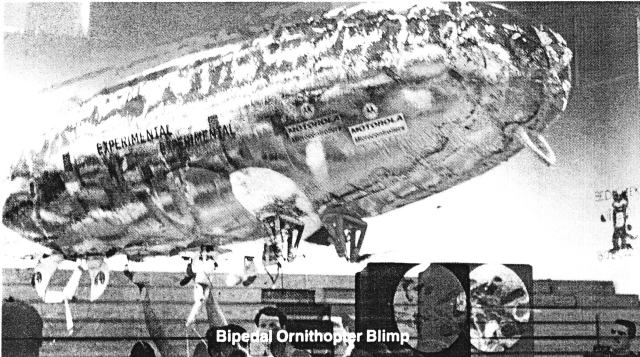
Bipedal Ornithopter in flight.
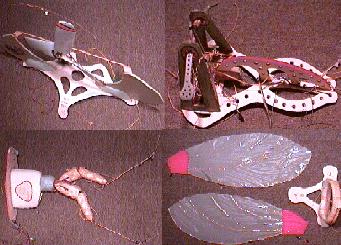
Parts.
Source: http://web.archive.org/web/19961114042310/http://robotgroup.org/projects/Roboblimp.html
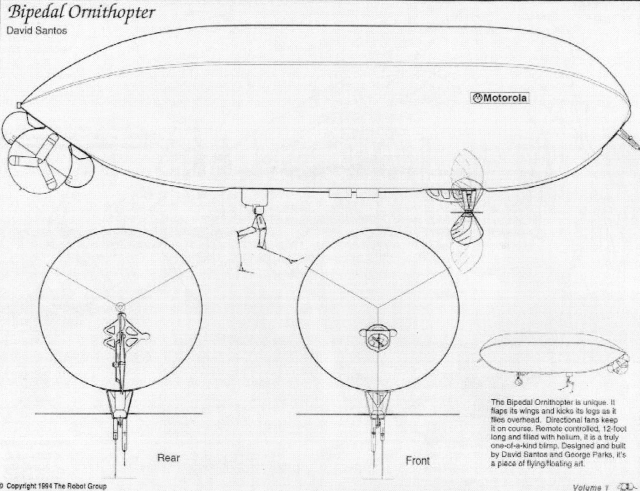
Bipedal Onithopter UAV By David Santos
It runs on two legs, flaps wings to take flight, and flys nimbly about the nooks and crannies of urban landscapes. Featured on the Discovery Channel's, Invention Series, ABC's Good Morning America, and Newsweek magazine.
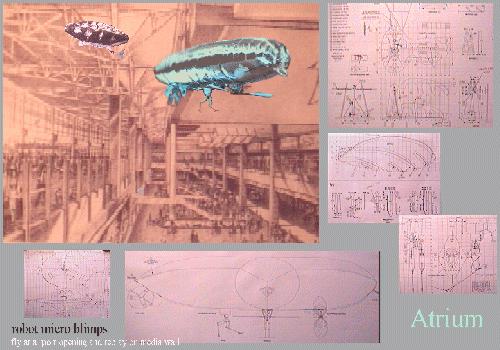
The blimp is a 12-foot-long airship with running legs and insect like wings. This project was one of several developed by David Santos designed to demonstrate far fetched concepts. Others he developed were a boat that sails directly into the wind, a rain powered vehicle, the ProtoAndroid, and flying spheres.
Want to build a micro-blimp? Instructions on fabricating envelopes are [were?] available from David Santos via The Robot Group.
Intellectual property statement- Patents Pending. Designs protected by copyright. Noncommercial personal and educational use encouraged.
Good Morning America featured Santos' flying sculpture, Bipedal Ornithopter, a robotic flying machine that runs on two legs and takes off with flapping wings, at the Omni Hotel atrium, summer of '93.
For another Bipedal Ornithopter, without the balloon, see the video below:
BOLT, the Bipedal Ornithopter for Locomotion Transitioning, is a lightweight bipedal ornithopter designed for high-speed dynamic running and transitioning between aerial and terrestrial locomotion modes. The advantages provided by wings in terrestrial locomotion, coupled with aerial capabilities, allow navigating complex three dimensional environments. The robot is fitted with a 6-axis IMU for studying the gait dynamics of both quasi-static and dynamic locomotion modes. The aerodynamic forces of the flapping wings impart passive stability to the robot, enabling bipedal running with a single actuator–a critical feature given the weight constraints on a flying platform. BOLT can transition from running to aerial hovering in as little as one meter of runway.