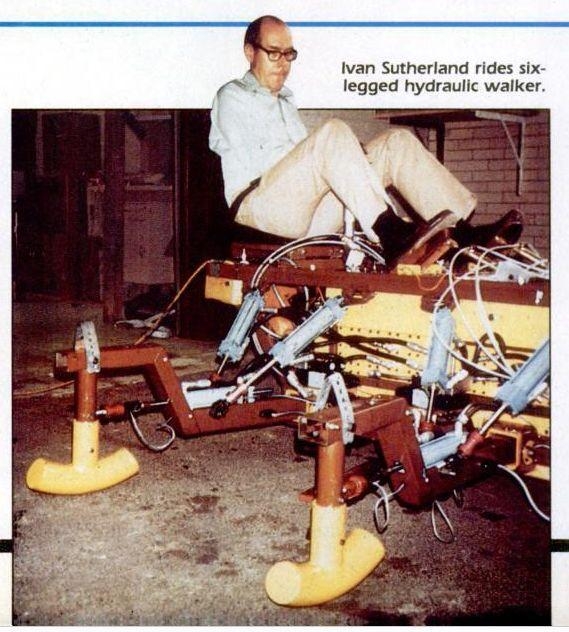
1983 "Trojan Cockroach", a Six-Legged Hydraulic Walker by Ivan Sutherland.
The Sutherland Walker was a six-legged all-terrain robotic designed by Sutherland Sproull Associates with the Robotics Institute at Carnegie Mellon University under contract to the Defense Advanced Research Projects Agency (DARPA). The robot used a gasoline motor to power its legs and required a driver to operate it via foot pedals. The machine would keep three legs on the ground at any given time, eliminating the need for balancing systems, though also limiting the speed of the system. Each leg could move forward, backwards, and side-to-side, allowing it to navigate across uneven surfaces.

-x640.jpg)

Image found at Adam Megacz images here.
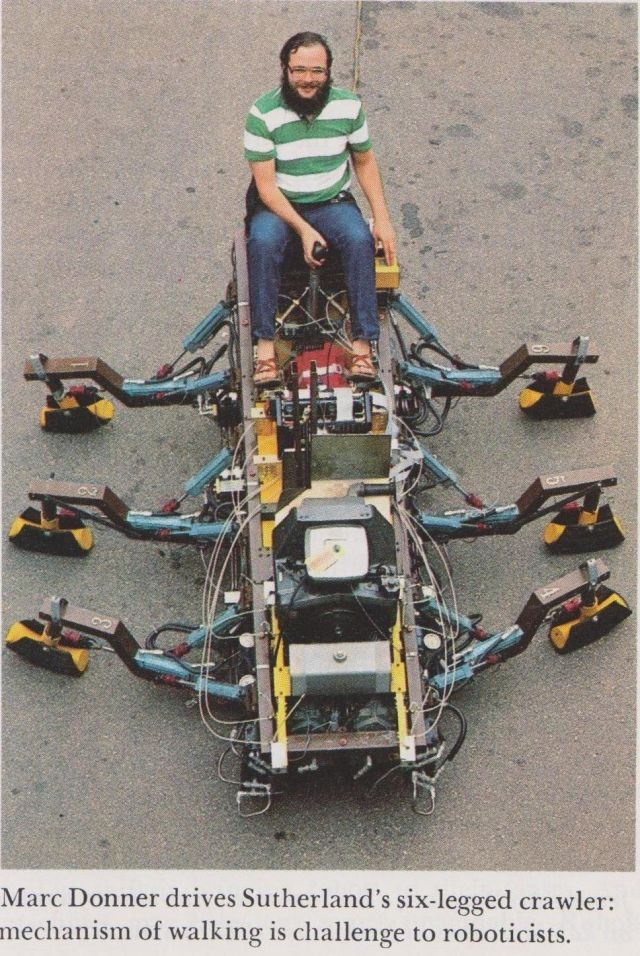
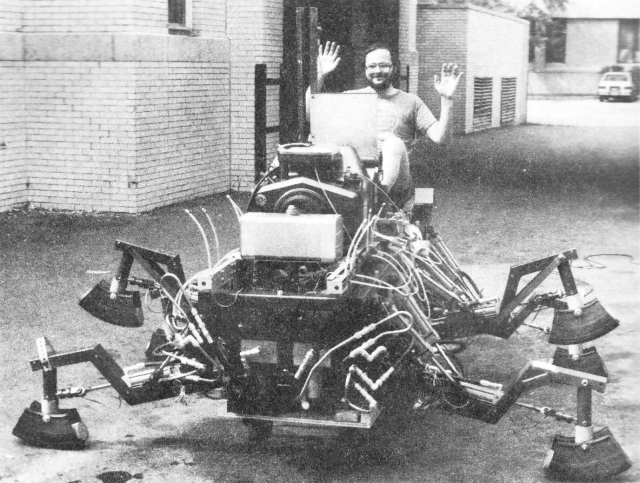
Marc Donner driving the walker "hands-free!"
-x640.jpg)
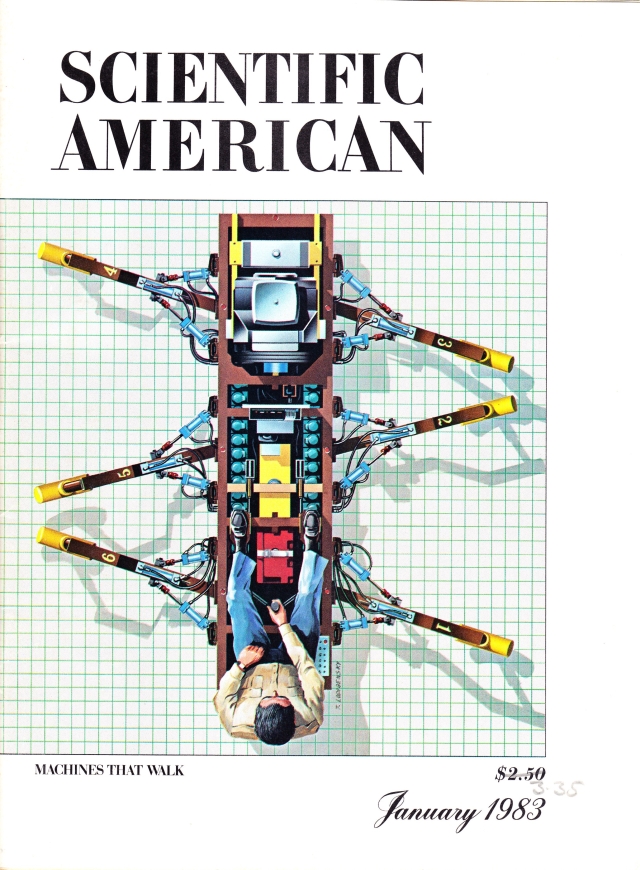
See the complete Scientific American article pdf here.
From D. J. Todd's book "Walking Machines" (1985)
Sutherland's Hexapod
This machine, designed by I.E. Sutherland of Carnegie-Mellon University and Sutherland, Sproull and Associates, is significant in being the first man-carrying computer-controlled walking machine (Raibert and Sutherland 1983; Sutherland and Ullner 1984). Its design is also interesting for its use of a leg geometry and hydraulic circuit design intended to reduce the control burden on both computer and driver by automatically coordinating joint motions in ways suitable for walking.
The hexapod, whose basic geometry is shown in Figure 6.7, is about 2.5m long and the same width. It weighs about 800kg and is powered by a 13kW gasoline engine driving four variable displacement pumps. The walking speed in the alternating tripod gait is 0.1m/s. It can also walk sideways at rather more than half this speed.
It has an unconventional arrangement of its hip actuators. Two cylinders are mounted in a 'V' above the leg. It is possible to set the valves so that as one shortens the other lengthens in such a way as to produce horizontal movement, whereas if they both move in the same sense they move the leg vertically. (A third actuator for the knee produces sideways movement.) This hip arrangement is one instance of what Sutherland calls a 'passive hydraulic circuit'. Such circuits achieve joint coordination in two ways. First, actuators are sometimes connected together in series so that as oil flows out of one it must flow into the next. This forces the actuators to move the same amount. Second, if two or three are connected in parallel they will automatically share any applied load equally. In this connection their collective movement is actively controlled by a pump, but their differential movement determined only by the relative loading of the actuators.
The hip connection for horizontal movement consists of putting two actuators in series so that as oil flows out of the fixed end of one it flows into the fixed end of the other. The motion is exactly horizontal only if the plane of the cylinders is inclined at 45° (Sutherland and Ullner 1984). A series connection is also made between the front and back actuator-pairs on each side to coordinate their movement during the propulsion stroke. This arrangement is shown for one tripod-set of legs in Figure 6.8 [not shown-RH]. In this illustration legs 2, 3 and 6 are being driven together. Each side has a separate pump so only legs 2 and 6 are connected together; the coordination between this pair and leg 3 is achieved by non-hydraulic means. Other series connections are possible.
The parallel connection is used for various purposes such as raising and lowering a set of legs, and to connect the knee actuators. If the three knee cylinders of a supporting tripod-set of legs are connected in parallel then although their collective sideways movement can be controlled by a pump, their differential movement is free and compensates both for the movement of the knee in an arc during forward rectilinear walking and for the larger sideways knee movement which must occur during a turn. This knee coordination is perhaps the most successful application of a passive hydraulic circuit.
The valves are all directional, not proportional or servo, spool valves, which are relatively cheap and simple but cannot control speed. Speed is regulated by manual control of the displacement of the pumps. The combination of the main propulsion pump and sideways motion pump flow rates governs the speed and direction of walking and the rate of turn. The pump displacements are controlled by pedals and a joystick.
The role of the on-board computer is to switch the valves on and off in the sequence appropriate to the specified gait. It can interrogate joint angle and leg force sensors, and the driver's controls. Several types of program have been written to test different methods of control, and a special language (OWL) has been developed (Donner 1983). The robot, which was built as a way of learning about hydraulic actuation, has now been scrapped.