Teleoperations and robotics: evolution and development Jean Vertut, Philippe Coiffet – 1986
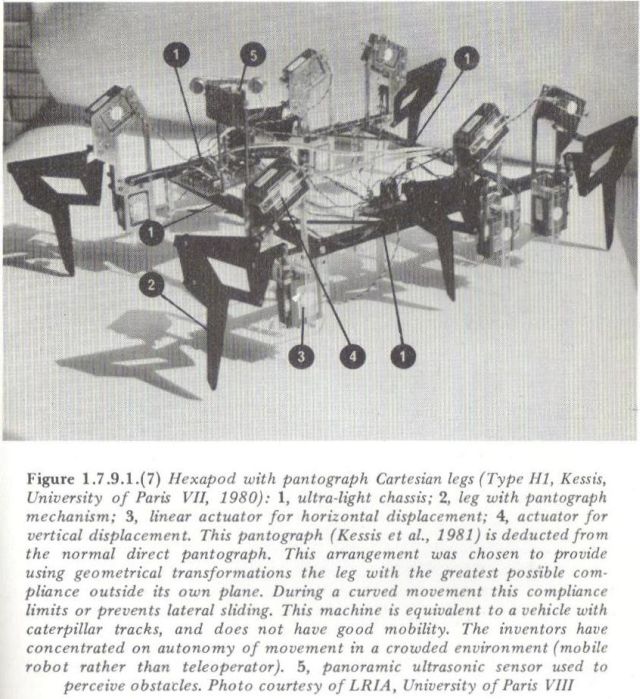
J.J. Kessis at the University of Paris VII developed an interesting vehicle with six articulated legs, with a pantograph, allowing coordination to be carried out mechanically in the plane of the leg. The high compliance of the chassis is required for turning and non-planar ground, which means that good mobility on ground is not possible.
Real-time control of walking By Marc D. Donner
Kessis has constructed a similar six legged machine in France and it is the subject of continuing research. This machine has six legs with two controlled degrees of freedom each. The problem of permitting the feet to move in the direction of the third degree of freedom in order to permit turning is handled by making the lower legs thin and flexible and letting them bend to comply with the terrain. Control is open loop, with the approach taken to gait control based on the analysis performed by Bessonov.
glad to see my hexapod there