
from "Walking robot with a circulating gait – Intelligent Robots and
Systems – IROS 90.
by JE Bares
Perhaps the simplest walkers that can travers rough terrain are frame-type walkers. An example is the Komatsu underwater octopod. ReCUS, which consists of two rectangular frames, each with four telescoping legs – the machine walks over rough terrain by supporting itself on one four-legged frame while advancing the other frame. The ReCUS steers by rotating the lifted frame with respect to the supporting frame. Since groups of legs are advanced and placed together, a frame walker's capability is limited in terrain where many areas are deemed unsuitable for footholds.
Y. Ishino, T. Naruse, T. Sawano, and H. Honma. "Walking Robot for Underwater Construction." Proc. ICAR, pp. 107-114: 1983
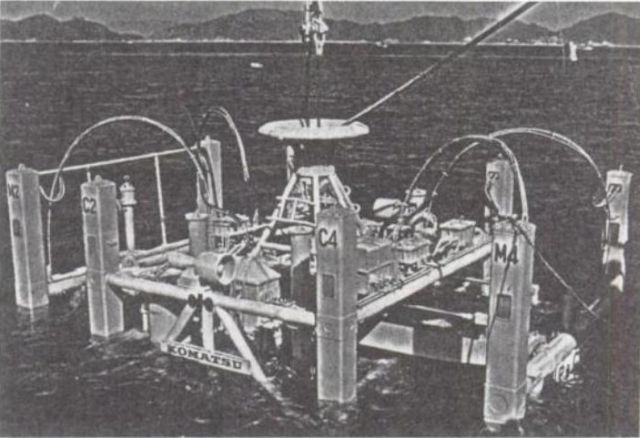
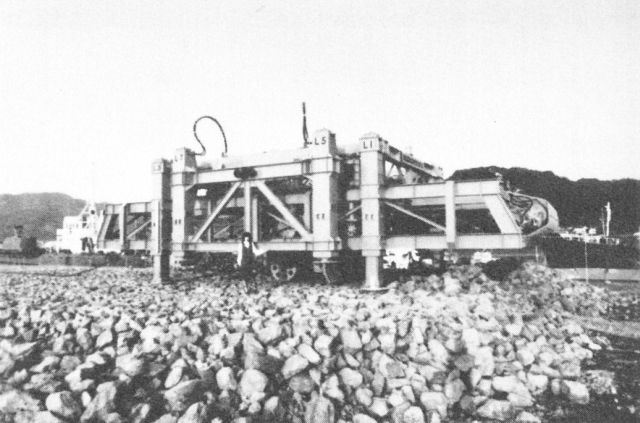
ReCUS – (Remotely Controlled Underwater Surveyor)
built by the Technical Research Center Komatsu Ltd, Japan. The machine was 8 m long, 5 m wide, 6 m high and weighed 29 tons in air.
From Walking Machines by D.J. Todd.
ReCUS: The Komatsu Underwater Octopod
This machine is of interest because it shows that there is a future for machines which, while advanced in some respects, avoid almost completely the issues which were seen as important by the designers of the ASV. The reason this is possible is, of course, that it is intended for a completely different function and environment: its principal design criteria are stability and accuracy of positioning. Speed and energetic efficiency are of only secondary concern.
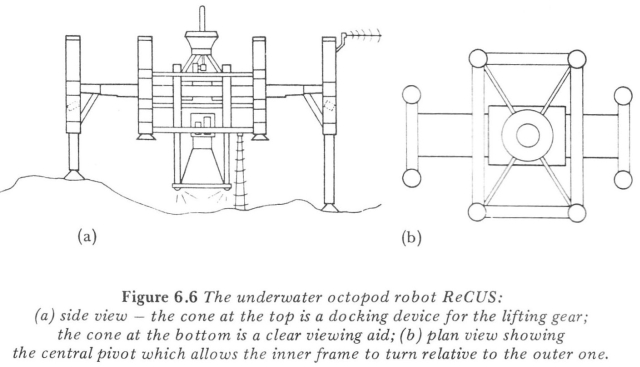
The 'ReCUS' robot has been developed by Komatsu Ltd for surveying the sea-bed prior to bridge pier and breakwater construction by the Honshu-Shikoku Bridge Authority (Ishino et al. 1983). It is shown in a simplified form in Figure 6.6 [see above]. The inner frame, with four vertically telescoping legs, slides longitudinally on the bed of the outer frame which also has four legs. To walk, the machine stands alternately on the outer and inner leg sets: an alternating tetrapod gait. The steering method is described in Chapter 4 (see Figure 4.17) [not included here].
ReCUS (Remotely Controlled Underwater Surveyor) is 8m long, 5m wide, 6m high and weighs 29 tons in air. The step length is 2.5m, the leg cylinder stroke is 2.2m and the walking speed is in the range 1.3 — 4m/min. It has been used in depths of 70m. The mother ship is a floating crane which lowers the robot to the sea floor. It carries a control cabin and the generator to supply power to the 37kW three- phase motor which drives the hydraulic pumps.
Walking is controlled by a PDP-11/03 single board computer on the mother ship, communicating with the ReCUS by a cable. A vertical gyro is used to sense body attitude. On a rough sea-bed a specified attitude can be maintained within ± 1o. A typical sea-bed roughness Is 1 — 2m. The horizontal attitude can be maintained on slopes of up to 20°. Position in the horizontal plane is determined using ultrasonic transponders fixed to the sea bed.
For its surveying function the robot carries a collection of television and still cameras and an ultrasonic scanning system. Komatsu have also proposed that ReCUS could be used for construction jobs such as levelling rubble. It would be fitted with a rake sliding on the main frame. Other proposed applications are drilling and trench digging.
A smaller but geometrically similar machine with magnetic feet for crawling over the vertical surface of a steel pressure vessel has been described by Kemmochi and Kazuoka (1983). Its use is ultrasonic inspection.
See also Norris' 1910 Walking Platform here.