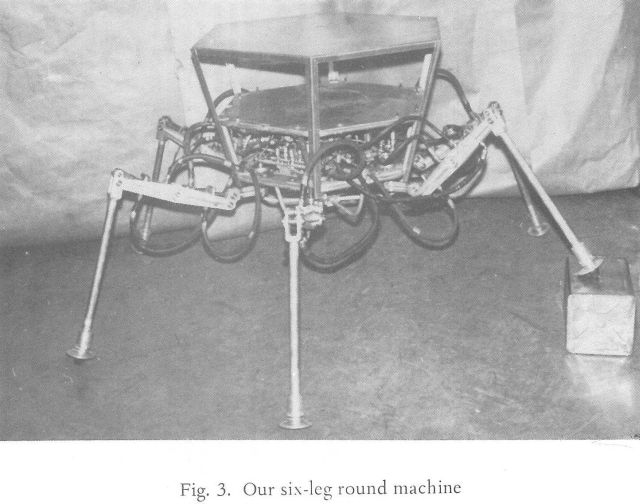
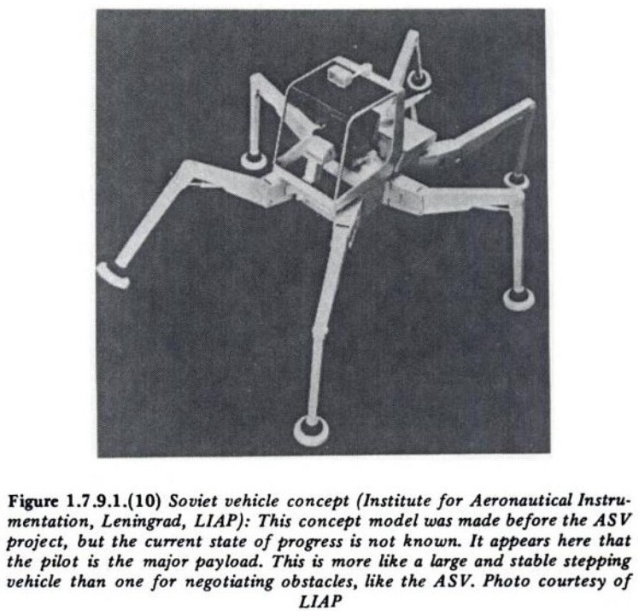
In 1974, a hexapod with legs arranged radially about a central vertical axis was made in the Aviation Instrument Institute in St.Petersburg. (Ignatyev et al, 1974).
Ignatyev, M., F.M.Kulakov & Mihaeilov, A.(1974). Algorithms for control of robot-manipulators. Mechanics of Machines 46, “Nauka”, Moscow, (in Russian).
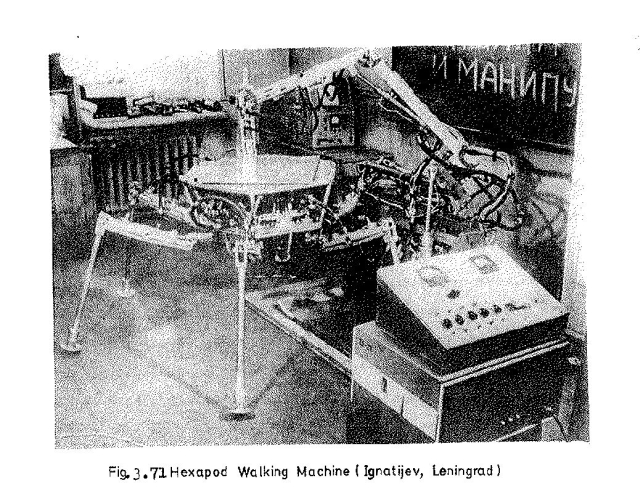
[RH-2012- The arm on the hexapod is actually the end-effector of the main robot on the right-hand side, and not the other way around. They are not connected.]
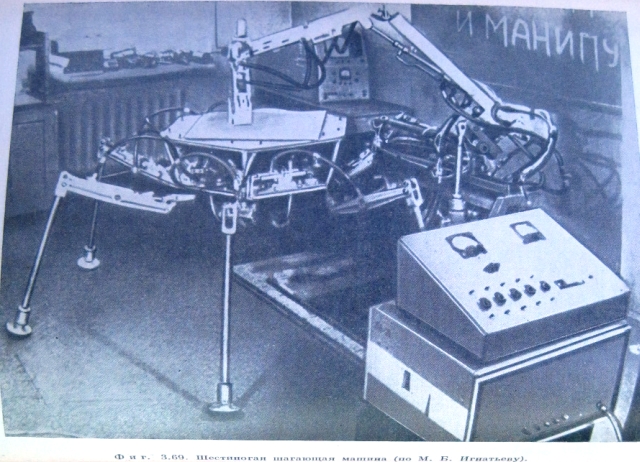
Image: 6-legged walker together with separate manipulator. The gripper end is touching the top of the walker.
Vukobratovich M. Shagayuschie roboty i antropomorfnye mehanizmy / M. Vukobratovich. – Moscow : Mir, 1976. – 544p.
M.B. Ignatiev with colleagues (Leningrad [, USSR – now Saint Petersburg, Russian Federation, remark of translator]) designed six-legged adaptive walking machine with hydraulic actuator.
http://www.pugwash.ru/structure/presidium/1276.html
PhD in Technical Sciences, Professor Mikhail B. Ignatiev is a specialist in the field of automatic and automated systems. He conducted research in the field of cybernetics, systems analysis and computer engineering, robotics. He created the world's first underwater robot controlled by a computer (1968), the industrial robot with a visual adaptation (1970), the adaptive six-legged walking machine (1972), the first flexible automated metal workshop at the Dnepropetrovsk Electric Locomotive Plant (1979).
Kozyrev Y.G. Promyshlennye roboty : Spravochnik / Y.G. Kozyrev. – [2nd edition] – Moscow : Mashinostroenie, 1988. – 392p.
The walking robot with six multilink legs. Six legs are placed symmetrically around of the six-corner frame. Such structure provides ability of motion in any direction without change of stereotype of extremity‘s movement, but with change of consistency of extremity‘s action only.
Thanks to Vadym Shvachko for extra information and translation.
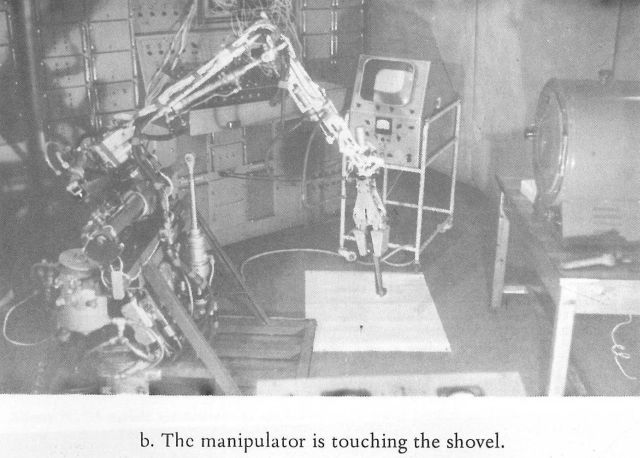
With his colleague M. V. Aristova, Ignatiev developed manipulators. In the above photo is the manipulator which is also shown placing an object on the flat top of the 6-legged walker in the images at the top of this post..

It is believed by the author that the above two concept images are related to Ignatiev's Hexapod walking machine, but has not been able to confirm it at this time.
See also NMIIIA Russian hexapod Rover that has a human payload.