1973 – Wheel Walker – Ralph Mosher
Wheels Used as Legs
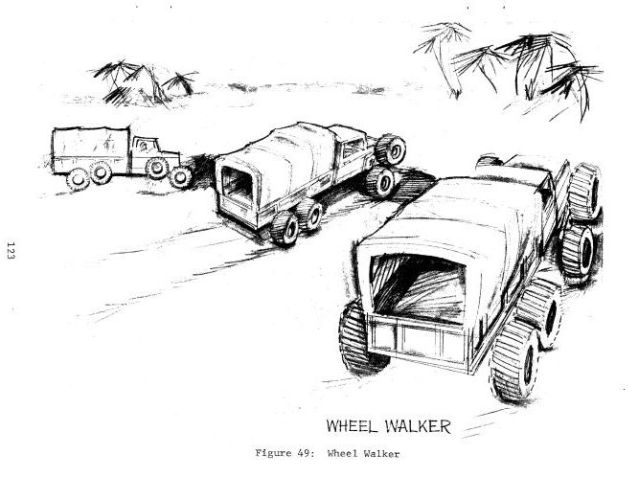
It is understood that many ideas have been presented that involve a combination of wheel actions such as rotation and orbiting. The idea shown in Figure 49 is different in that an immobilized wheel experiencing slipping and bulldozing will transfer its action from wheel rotate to straight-line rearward motion. The translation motion is not an orbiting or circular action. This concept is a direct outgrowth of the thinking involved in developing the walking vehicle. Although the stepping device involves wheels, it is truly a stepping device. The translation motion and the stepover motion of the second wheel act as a bipedal motion of one leg stepping over the other. The chassis of the vehicle is promoted forward just as the human body is through the pelvic action. It can be thought of as being similar to pole vaulting, one over the other. The concept does not depend on terrain shear strength in the Lateral direction. All that is required to make this concept work, in terrain properties, is adequate load bearing capacity.
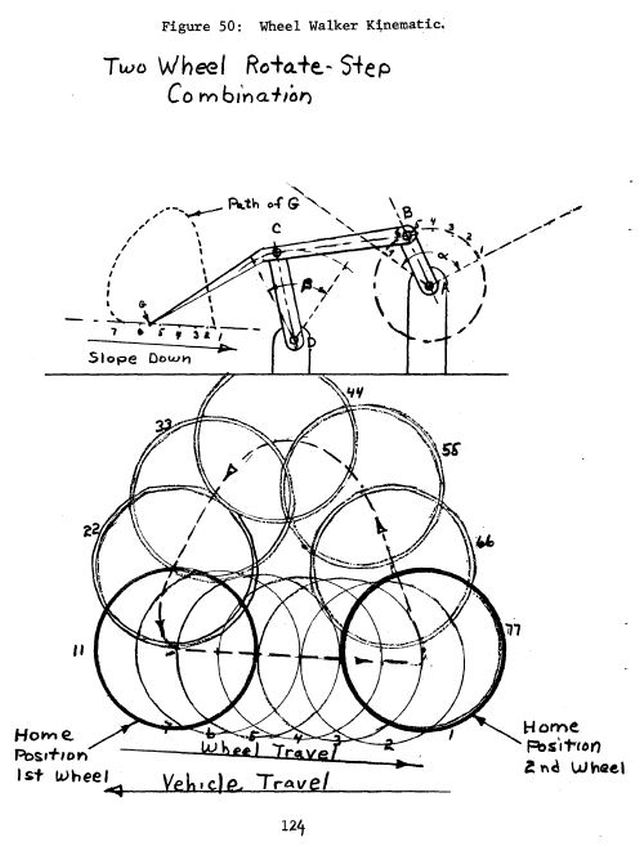
Figure 50 shows a schematic diagram of a linkage concept that could provide this translation and stepping motion for this dual wheel system. In this diagram, a multiplicity of circles represent the proposed action of the two wheels. The first wheel is shown in the forward position. It is proposed that encountered frontal resistance or wheel slippage will cause the wheel to travel rearward and slightly down. At the same time, the stepping action occurs with the second wheel. The relative positions of the two wheels are indicated by single and double numerical connotations. As an example, position 7 of the first wheel corresponds to position 77 of the second wheel. This diagram indicates start of motion with the highest digit first, so that motion of the first wheel is shown to start at position 7 and the motion of the second wheel starts from position 77 (and at the same time as the first wheel starts). Home positions are shown as number 1 and 11. Of course, this two wheel system would require two sets of the four-bar linkage system shown. The two pair of four-bar linkages would be interconnected to operate as complementary pairs with the motion of one four bar linkage depending on the other. A differential transmission would provide transition from wheel rotary motion to stepping action. The idea of the slight slope of the straight line motion is to provide automatic preference of wheel rotary action compared to the stepping motion.
There are two key principles involved. One is the principle of stepping action and the second is the use of force reaction on the wheel to provide selectivity of the wheel rotary motion for the translate and step motion. It is beyond the scope of this report to analyze and design the complete system such as suggested by this concept. However the concept is outlined and it is suggested that at least some more thought be given to this idea to determine feasibility and practicability.
From Technical Report 11768 Applying Force Feedback Servomechanism Technology To Mobility Problems, US Army Tank-Automotive Command, 1973, by Ralph S. Mosher, Robotics Inc.
See other early Walking Wheels and Walking Machines here.
See other GE CAMS here:
 1956- GE Yes Man
1956- GE Yes Man 1958-9- GE Handyman – Ralph Mosher
1958-9- GE Handyman – Ralph Mosher 1962 – GE Pedipulator – Ralph Mosher
1962 – GE Pedipulator – Ralph Mosher 1969 – GE Walking Truck – Ralph Mosher
1969 – GE Walking Truck – Ralph Mosher 1965-71- GE Hardiman I
1965-71- GE Hardiman I 1969- GE Man-Mate Industrial manipulator
1969- GE Man-Mate Industrial manipulator