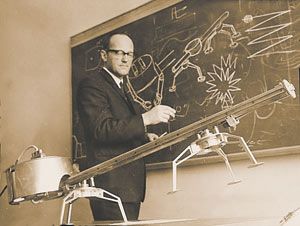
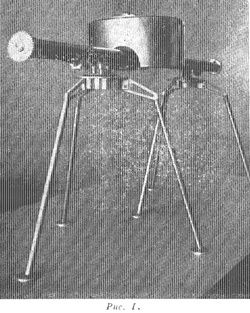
Professor Katsyu [ПрофеÑÑор Г. КатыÑ] with his walker.

Source: «Ð¢ÐµÑ…ника-молодежи» 1972 г â„–2, Ñ.16-17, 19

Build the model! Full source: Юный-техник 1972-01
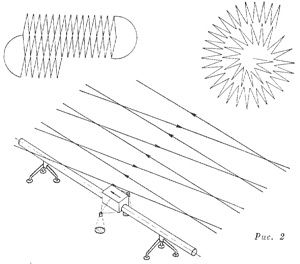
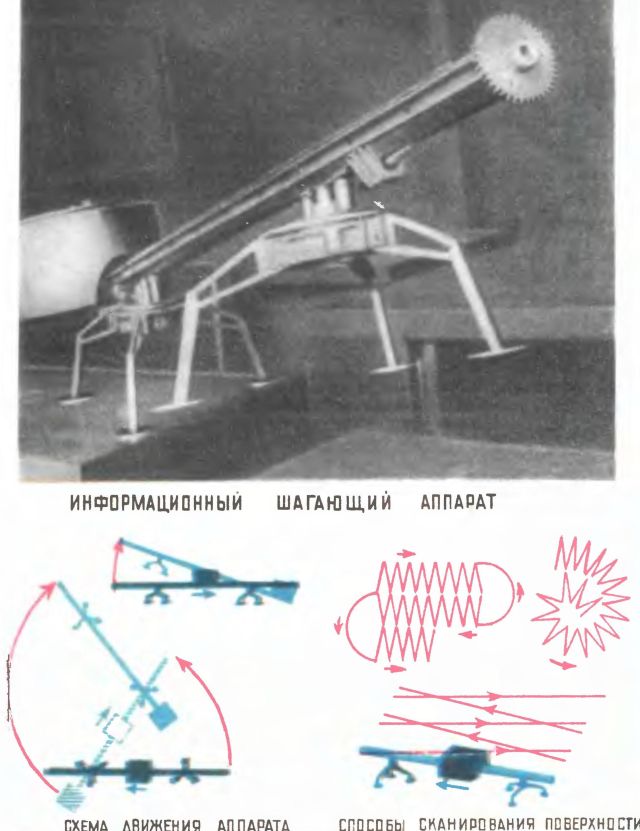
Sample walking actions.
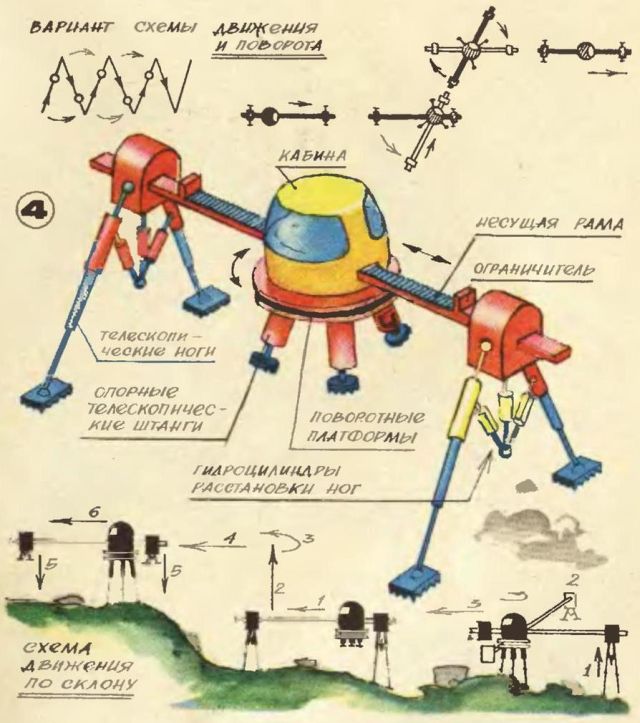
Professor GP Katysu proposed a model of two-link wheeled walking mechanism, the principle of operation is reduced as an obstacle to one link and deferred to his center of gravity of the mechanism, and then pulled up and the second link.
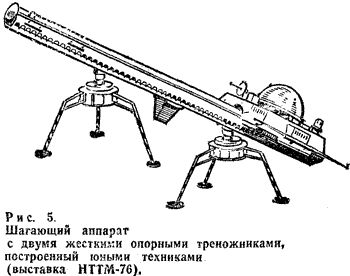
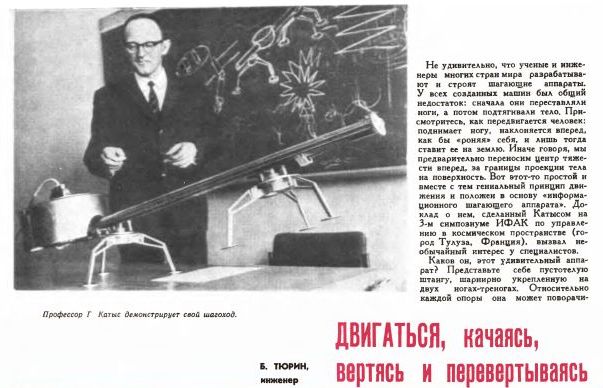
The idea of transferring alternating legs relative to the main housing like the construction described above lies in the other model walker Professor GP Katysu. Here are the two pillars of hard tripod that can mark again thanks to a long block frame mechanism. While a tripod is lifted and moved forward by a certain distance, the machine rests on the other, and then moves toward the first and second transfers over the obstacle. The design is extremely simple, as well as the scheme itself pacing, so has good prospects praktichegkogo use. The Ka-76 NTTM exhibition was shown a working model of such a device built young technicians.
Source: here.
Source: Юный-техник 1978-11

Prof. Katsyu with a "manned" model of Katsyu's unique walker.
Source: Popular Mechanics May,1994.
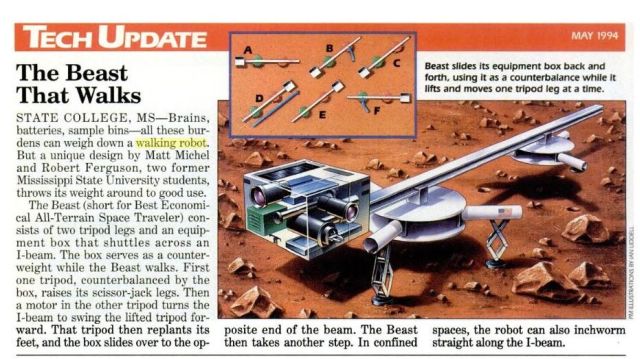
The Beast That Walks
Beast slides its equipment box back and forth, using it as a counterbalance while it lifts and moves one tripod leg at a time.
STATE COLLEGE, MS — Brains, batteries, sample bins—all these burdens can weigh down a walking robot. But a unique design by Matt Michel and Robert Ferguson, two former Mississippi State University students, throws its weight around to good use.
The Beast (short for Best Economical All-Terrain Space Traveler) consists of two tripod legs and an equipment box that shuttles across an I-beam. The box serves as a counterweight while the Beast walks. First one tripod, counterbalanced by the box, raises its scissor jack legs. Then a motor in the other tripod turns the I-beam to swing the lifted tripod forward. That tripod then replants its feet, and the box slides over to the opposite end of the beam. The Beast then takes another step. In confined spaces, the robot can also inchworm straight along the I-beam.

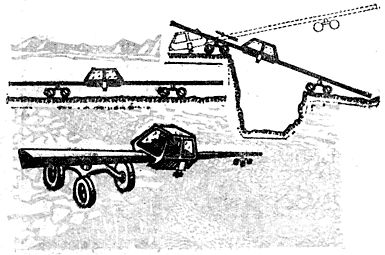
A concept excavator using the sliding beam, but without counterweighted pivoting.