PrOP-M is now at the museum in St.Petersburg.
.jpg)
PrOP-M (Device Evaluation Terrain – Mars) [Note: the acronym only works in Russian]
ПрОП-Ðœ (Прибор Оценки ПроходимоÑти – МарÑ)
Mass………………………………………………4 kg
Overall dimensions…………………………215x160x60 mm
Travel speed……………………………………1 m/h
Power consumption………………………………5 W
Customer: Lavochkin Association.
(First translated article)
Two automated rovers reached Mars in 1971 during a mission the Mars 2 and Mars 3. None of them did not fulfill its mission. Mars 2 crashed while landing on the planet, and Mars-3 stopped transmission of the signal after about 20 seconds after landing. The presence of mobile phones in those missions was concealed for 20 years.
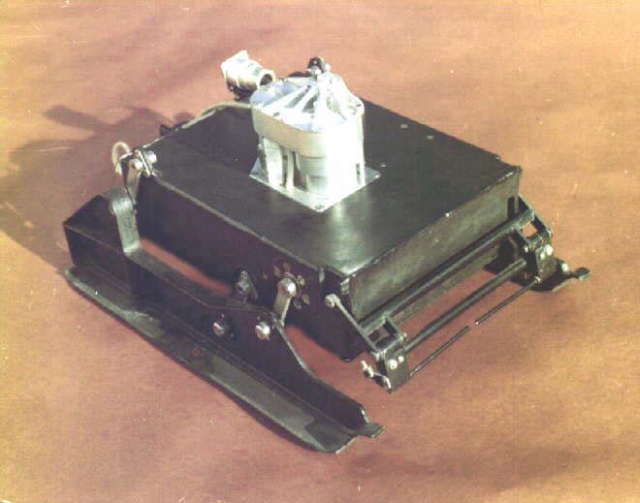
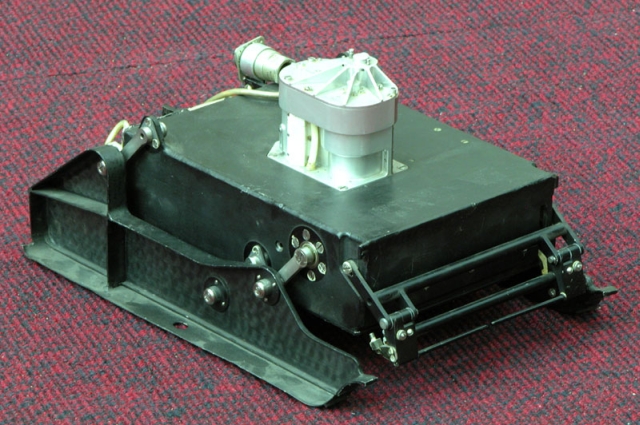
In all the descriptions of the Mars 2 and 3 are omitted mention of the small walking machine weighing 4.5 kg, attached a cable to a lander. Rover itself looked like a small box with a small ledge in the middle. The devices were supposed to move over the surface using two skis, which are on the sides, slightly raise the unit above the surface. On the surface, in the scope of cameras, it would put the manipulator. Two thin bars at the front (if you look closely at the photo, you'll see them) are the sensors to detect obstacles. Movable apparatus could determine which side is the obstacle to retreat from it and try to get around. Каждые 1,5 метра он делал бы оÑтановки Ð´Ð»Ñ Ð¿Ð¾Ð´Ñ‚Ð²ÐµÑ€Ð¶Ð´ÐµÐ½Ð¸Ñ Ð¿Ñ€Ð°Ð²Ð¸Ð»ÑŒÐ½Ð¾Ñти курÑа движениÑ. Every 1.5 meters, he would make a stop to confirm the accuracy rate of movement. This basic artificial intelligence was necessary for the Mars mobile devices, a signal from Earth to Mars goes from 4 to 20 minutes is too long for a mobile robot. By the time of arrival of commands from Earth, the rover may already be out of order.
Each Soviet rover carried two scientific instruments: a dynamic penetrometer and a radiation densitometer. They were supposed to measure the soil density. Although the landers Mars 2 and 3 are out of order, their accompanying orbiters have successfully completed their mission and returned to Earth valuable scientific data. МарÑ-2, Mars-2, although it crashed, but became the first man-made object on Mars. According to one version, the loss of signal from the Mars-3 is associated with strong dust storm that raged at that time on the surface.
Walking apparatus for the study of Mars PrOP-M, 1971
Mars 2 was launched on 19 May 1971 and reached the red planet on 27 November. Mars-3 followed him a few days later, on May 28 and landed on December 2. Orbiters continued its work until August 1972 when the Soviets announced the completion of the mission. The U.S. probe Mariner-9 was the shove in the same launch window (when the relative positions of Earth and Mars allow rapid travel between them). Flight of Mariner 9 began on May 30, he entered orbit around Mars on 14 November. Orbital mission was, without capsule, so dust storms on the surface does not affect the course of the mission. He waited for the storm, but when the dust dispersed, explore more volcanoes on Tharsis plain, layered polar terrain, ancient riverbeds, nature, seasonal changes, and the valley of the Mariner, named in honor of its automated researcher.
(Second translated article)
A device called PrOP-M intended to study the Martian soil near the surface. Devices were associated with the landing stage data cables, so were able to be moved no more than 15 meters from the landing site.
History
As reported by the site of the Institute of History of Science and Technology Academy of Sciences , during a training apparatus Mars-3, a leading specialist "VNIItransmash" VV proposed to replace the balance weight on the instrument cross-country evaluation. This idea was supported and implemented quickly enough, although it required extra effort: the implementation of the rover and its ground tests, removal of the device rovers on the surface, to ensure its power and communication with the lander, etc.

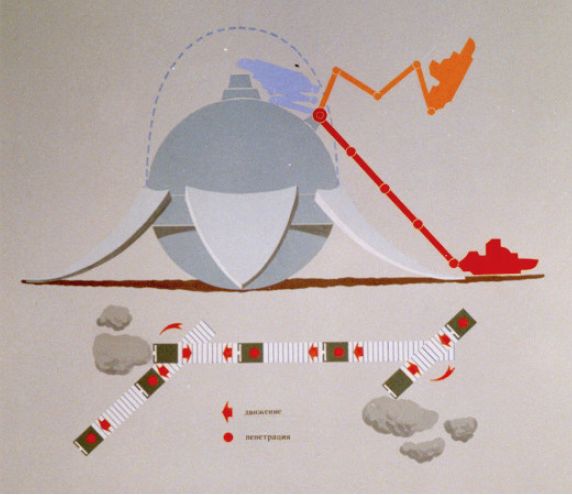
Here is a picture device for lowering the apparatus PrOP-M:
It is because of the fact that the rover has replaced balancing weight – its mass according to the specifications should not exceed 5 kg. Therefore, the rover itself is very simple.
After completion of the mission the spacecraft Mars 2 and Mars 3, when the two rovers have been irretrievably lost, suddenly found the third rover – back here on Earth. After all, these devices do not cost so much, and make the third copy for any verification needs is easy. This is the best, the third instance – are still at the Museum CEO Peter and Paul Fortress in St. Petersburg.
Device chassis
Very interesting way to move the world's first Mars rovers – the ski-walking. As can be seen in the figure, each unit represented the small box with skis on both sides. Motion carried as follows: based on skis, moved forward corps, the unit will sit on the bottom of the skis move to the next step. Rotate the moving of the skis in different directions. If the device encountered an obstacle (double-contact touch the front bumper), it autonomously exercised detour following algorithm: give it back, turn a certain angle, moving forward.
In the book Alexander Leonovich Kemurdzhiana "planetary" I found a couple of words about the advantages of this type of landing gear (p. 318-319, available for download, for example, with AstroLib.Ru ): "ski-walking mover provides high traction characteristics on dry soils . Also, I suspect a similar device can crawl over very thin ice and fall through. The main drawback of the device – certainly low speed."
I haven't been able to find much on PrOP-M. However, most of my textual information above did come from here and here (original in Russian).
See PrOP-M in my compilation video clip here.
One Reply to “1971 – PrOP-M Mars Mini Rover (Soviet)”
Comments are closed.