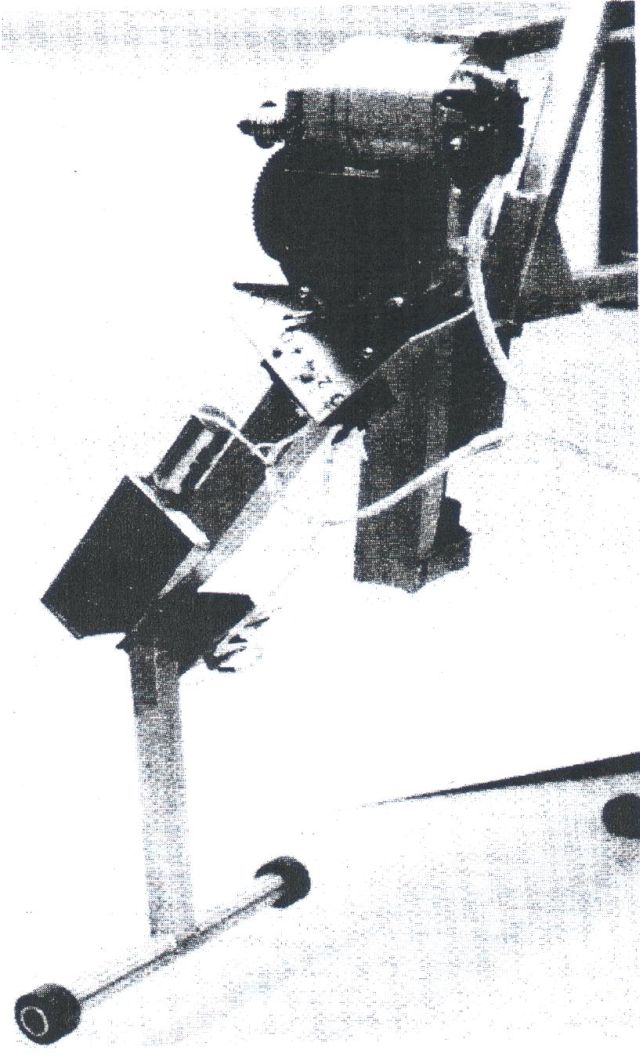
Leg detail – motors are modified power drills.
From George A. Bekey – Autonomous Robots – From Biological Inspiration to Implementation and Control (2005)
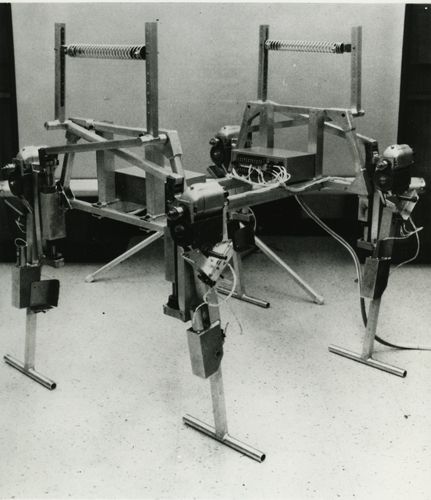
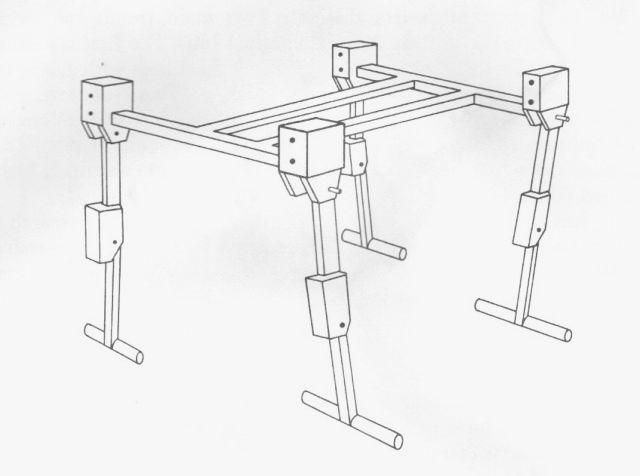
The first autonomous quadruped robot in the United States was constructed in the 1960's at the University of Southern California; it was dubbed the Phony Pony [ McGhee's own documents also have the alternate spelling of "Phoney Pony". Others called it "The Californian Horse".] The four legs of this robot had two joints each (hip and knee). They were identical to one another, and the front and back pair were mounted and controlled in the same way. [This fact made our laboratory the subject of numerous jokes, mostly emphasising that this robot proved that engineers did not know the difference between the front and the back of a horse. Of course, students used somewhat less polite language.] This was a highly non-biological structure, since the architecture of the front and back legs of living quadrupeds and their support structure differe markedly from those of the robot. Nevertheless, the robot was capable of emulating a number of quadruped gasit patterns, including crawl, walk, and trot, but at a very slow speed. It was able to maintain static vertical stability in these gaits by means of unique spring-restrained "pelvic" structure and by virtue of its wide feet. The machine was not capable of high-speed gaits (such as cantor or gallop) in which all four legs may be off the ground for short time intervals.
This robot was constructed before the existance of microprocessors, so it was controlled by means of a remote minicomputer (located on the second floor of an adjacent building!). The cable connecting the robot with the computer is visible in the right edge of the figure. The robot was controlled by a finite-state machine using sensory feedback on the state of its joints, without any internal model of its kinematics or dynamics.
Al;though the Phony Pony was constructed by Andrew Frank (1968) as part of his Ph.D. dissertation, [I {Bekey} was chairman of Andrew Frank's doctoral committee, but his work was directed largely by Bob McGhee and Rajko Tomovic. McGhee and I obtained a visiting-scholar grant from the National Science Foundation that enabled Tomovic to spend a year at USC, Frank then spent a postdoctoral year with tomovic in Yugoslavia.] much of the theoretical work was done by Bob McGhee and Rajko Tomovic, who proposed a finite-state machine as a model for human locomotion. This work was then elaborated as a control method for quadruped locomotion and used by Frank for control of the Phony Pony. The theory was further elaborated with respect to quadruped "creeping gaits", that is, gaits that can be executed while keeping at least three feet on the ground at all times. (Although in theory there are many possible quadruped gaits, only six can be considered creeping gaits.) Frank and McGhee then established under what conditions a trot can be made stable using a control system whose only inputs are leg joint angles.
The control of the Phony Pony probably represents the first application of finite-state automata to robot walking, a number of years before the development of Genghis at MIT.