
As a child, I really wanted one of these! Of the three built, two may still be in existance at the Rancho Los Amigos. 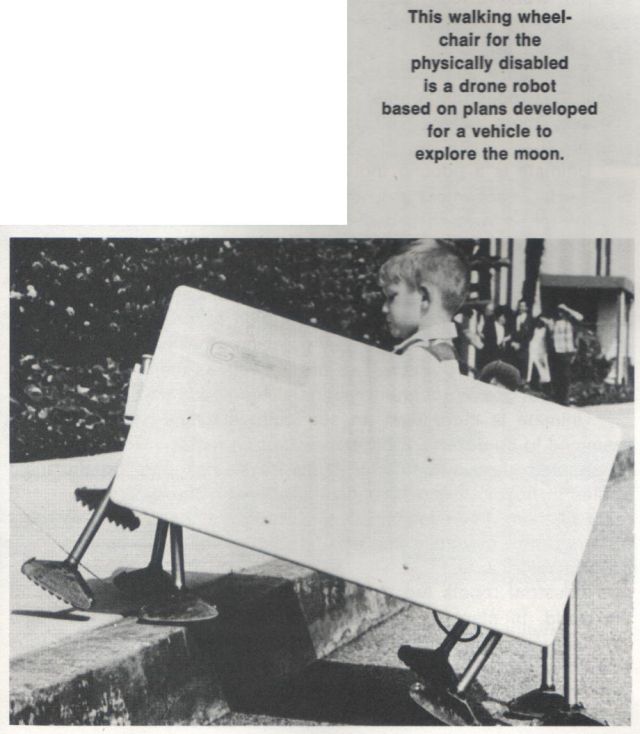

**Video clip via youtube – has both the Moon walker prototype and the chair**
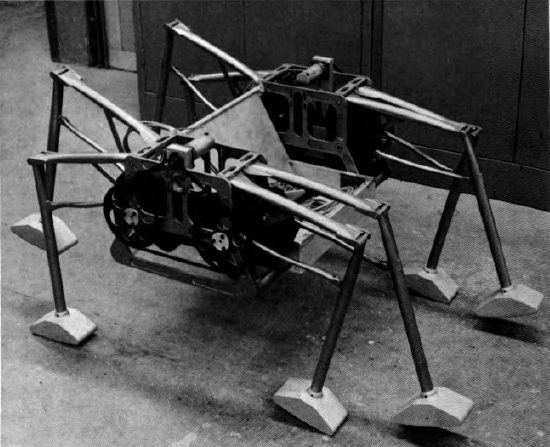
Either an early version, or the prototype for the later Iron Mule Train see here.
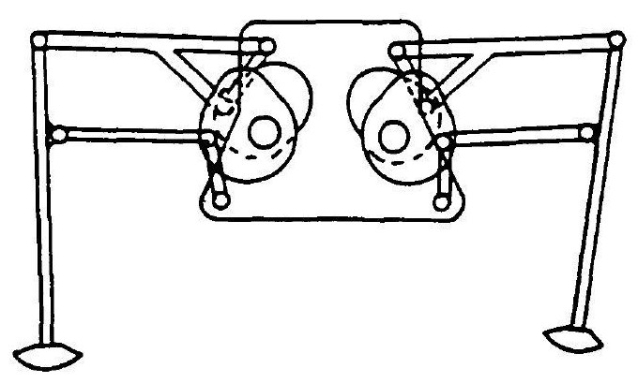
Cam-leg set-up (only one pair shown).

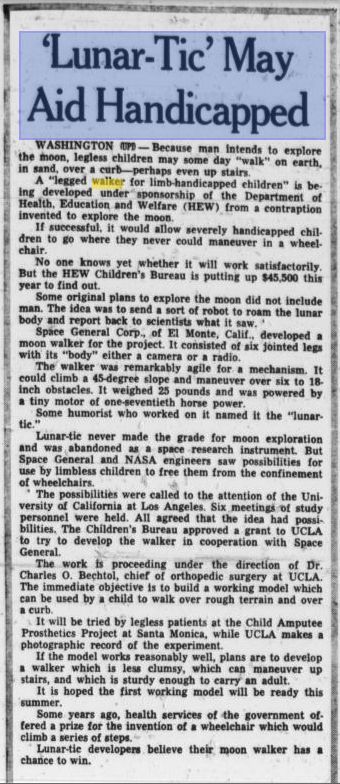
Extract from R.F. Brodsky's book "ON THE CUTTING EDGE" c2005
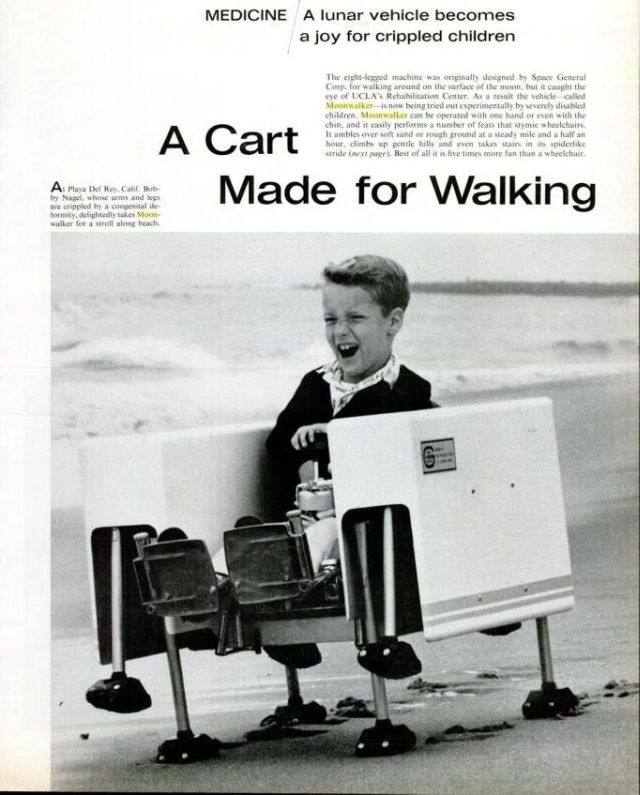
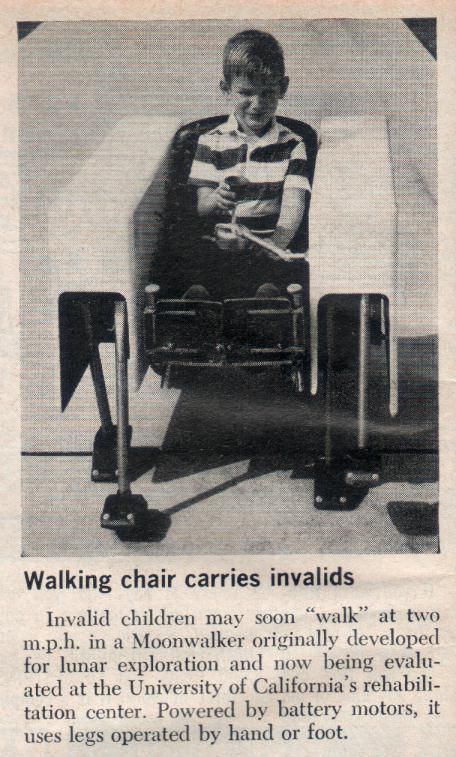
THE WALKING WHEELCHAIR
“The damned thing looks like a cross between a crazy Bull Terrier and a Peacock!”, my Boss said. After weeks of in-plant secrecy, we had finally unveiled our robotic entry in the moon rover sweepstakes. To everyone’s amazement and delight, Jack Miller was directing its peregrinations around the back forty of our El Monte campus, using a hand-held radio control link device. With its ridiculous TV camera “head” wagging from side to side on its long tubular swiveling “neck” scanning the local scenery, the six legged beast really did look outré – like a malformed hound out of Star Wars.
IN THE EARLY ‘60S, AS PART OF THE PREPARATIONS FOR THE APOLLO MANNED MOON LANDING MISSION, THE JET PROPULSION LAB PLANNED A FOLLOW-ON PROGRAM TO ITS VERY SUCCESSFUL ‘HARD’ LANDING ‘RANGER’ PROGRAM, WHICH GAVE THE FIRST CLOSE-UP VIEWS OF THE MOON’S SURFACE. THE PROPOSED ‘SOFT’ LANDER PROGRAM WAS CALLED ‘SURVEYOR’. AN INITIAL CONCEPT WAS FOR IT TO DISGORGE A MOON SURFACE-TRAVERSING VEHICLE TO CONDUCT A NEIGHBORHOOD SURVEY NEAR ITS LANDING POSITION. IT WAS TO BE COMMANDED BY A TV – RADIO CONTROL GUIDANCE LINK. THIS LINK WAS TO BE RELAYED TO AND FROM THE MOON VIA THE SURVEYOR’S EARTH COMMUNICATION SYSTEM. A LUNAR ROVER COMPETITION WAS OPENED AND THE RELATIVELY NEW STAR ON THE HORIZON, SPACE-GENERAL, DECIDED TO RESPOND.
“The damned thing looks like a cross between a crazy Bull Terrier and a Peacock!”, my Boss said. After weeks of in-plant secrecy, we had finally unveiled our robotic entry in the moon rover sweepstakes. To everyone’s amazement and delight, Jack Miller was directing its peregrinations around the back forty of our El Monte campus, using a hand-held radio control link device. With its ridiculous TV camera “head” wagging from side to side on its long tubular swiveling “neck” scanning the local scenery, the six legged beast really did look outré – like a malformed hound out of Star Wars.
IN THE EARLY ‘60S, AS PART OF THE PREPARATIONS FOR THE APOLLO MANNED MOON LANDING MISSION, THE JET PROPULSION LAB PLANNED A FOLLOW-ON PROGRAM TO ITS VERY SUCCESSFUL ‘HARD’ LANDING ‘RANGER’ PROGRAM, WHICH GAVE THE FIRST CLOSE-UP VIEWS OF THE MOON’S SURFACE. THE PROPOSED ‘SOFT’ LANDER PROGRAM WAS CALLED ‘SURVEYOR’. AN INITIAL CONCEPT WAS FOR IT TO DISGORGE A MOON SURFACE-TRAVERSING VEHICLE TO CONDUCT A NEIGHBORHOOD SURVEY NEAR ITS LANDING POSITION. IT WAS TO BE COMMANDED BY A TV – RADIO CONTROL GUIDANCE LINK. THIS LINK WAS TO BE RELAYED TO AND FROM THE MOON VIA THE SURVEYOR’S EARTH COMMUNICATION SYSTEM. A LUNAR ROVER COMPETITION WAS OPENED AND THE RELATIVELY NEW STAR ON THE HORIZON, SPACE-GENERAL, DECIDED TO RESPOND.
At that time, I was Chief Engineer, reporting to Dr. Fred Eimer, recently recruited from JPL by Jack Froehlich and who, in turn, had reached back there to recruit Jack Miller and Al Morrison for my Design Group. They quickly had proven themselves to be two absolutely top-notch designers. I organized a proposal team, with the sterling duo in the conceptual design lead. The design we came up with was a walking, rather than a rolling or hopping, vehicle. We believed a walker stood a better chance of navigating an unknown surface than the other options. Its body was triangular in shape, longer in the forward moving direction than wide, and about 6 inches thick. Its flat sides were parallel to the ground, with the underside standing about a foot off the ground. The swivel – mounted TV camera that looked like a Cyclops was mounted on the forward – moving point of the triangle. The aft sets of legs emanated from the other two points of the triangle, thus providing a broad stable base to preclude tipping. More than covering the creature’s upper back was a square solar array which provided drive motor, communications, and TV camera power. This array was hinged near the base of the TV camera supporting “neck”, and could be raised up to a 45 degree angle to track the sun as it moved through its lunar day. At its larger angle extensions, it gave the beast the appearance of a peacock in heat! The antenna that communicated with the Surveyor was attached to the top end of the array. Adding to the fowl appearance was a forward thrusting claw at the end of a second tubular bendable “neck”, meant to pick up lunar samples, but actually looking more like a peacock pecking at the ground.
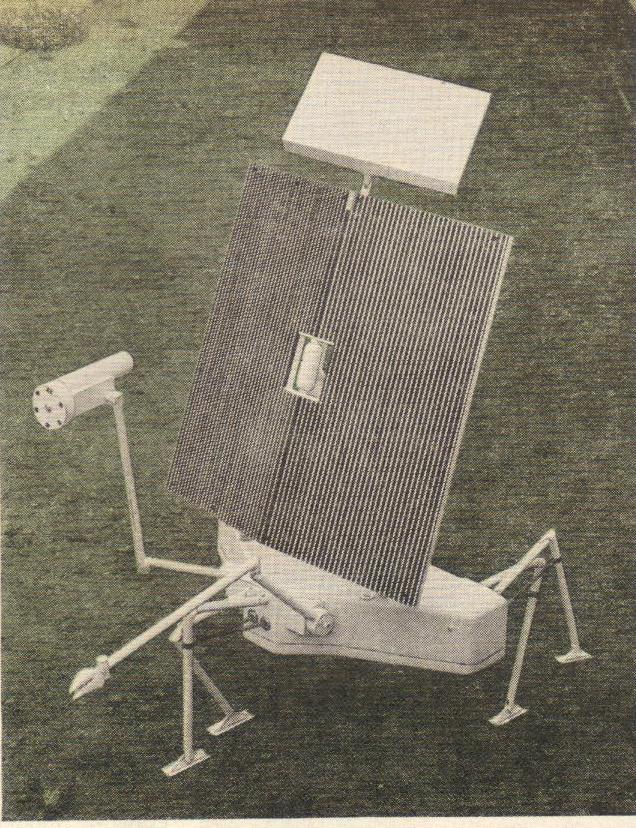
ORIGINAL “MOONWALKER” WITH STEREO
TV ‘HEAD’ AND SOIL SAMPLER CLAW
However, the feature that made it all work was the unique arrangement and motion of the three pairs of biped-like tubular legs, with both knee and hip joints, which gave it the ability to navigate through minor pitfalls such as rocks and potholes. Any larger impediments would be avoided via command from the earth operator who would see them in time to transmit a “halt” signal. The motion of each leg set looked like a dog’s front legs digging a hole in the ground.
The two sets of rear legs were attached to the “haunches” of the triangular body, while the single forward set was attached under the long-necked TV “head”. The footpads themselves were slightly rounded and serrated on the bottom to provide a good grip, and thus precluded the need for an ankle joint.
The driving mechanisms that Jack and Al devised were such that there were always three of the six feet on the ground simultaneously, moving backwards to provide forward motion. The other three leg sets, each located right next to and parallel to the foot already on the ground, were making a rapid return cycle so that they would contact the ground forward just as the propelling feet reached the end of their backward travel. Steering was achieved by simultaneously speeding up one haunch set of legs while proportionately slowing down the other side. The forward pair of legs maintained the normal pace. If forward motion was impeded before the earth controllers could act soon enough to stop and regroup, the robot automatically ceased forward travel and waited for a command, perhaps to back up and make a turn before proceeding forward again. We decided to make a full scale demonstration model of the concept as part of our proposal submittal. It stood about four feet tall from the ball of its foot to the top of its deployed antenna. It was this model that delighted our peers, with its fey look of a defanged futuristic pet. It truly was sensational!
Alas, by the end of the competition, the SURVEYOR’s final design weight had grown so heavy that the intended launch vehicle did not have the lifting power to accomplish the mission. Weight had to be dropped and, to our everlasting grief, the moon rover portion of the program was summarily deleted. When I heard the news, I almost cried. We had poured so much heart and soul in the frenzied period of the proposal effort. All the participants were simply unwilling to let go of what we perceived as a wondrous device and sought ways to revive the program. The beast was kept around the office like a pet.
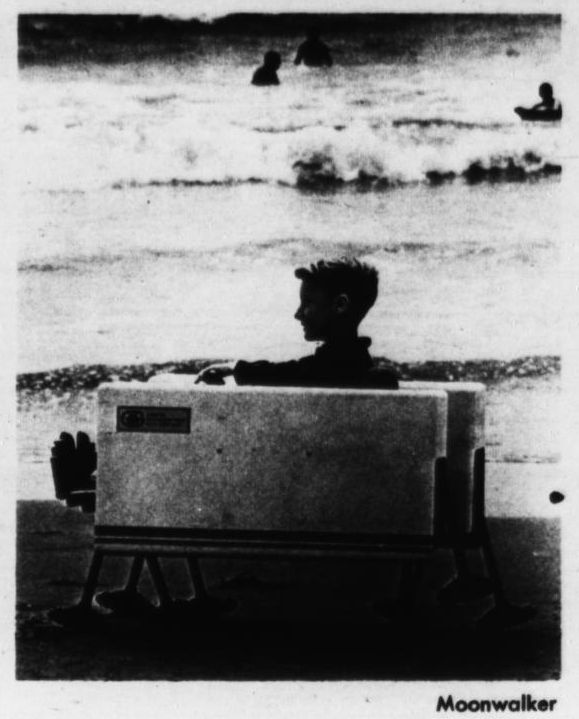
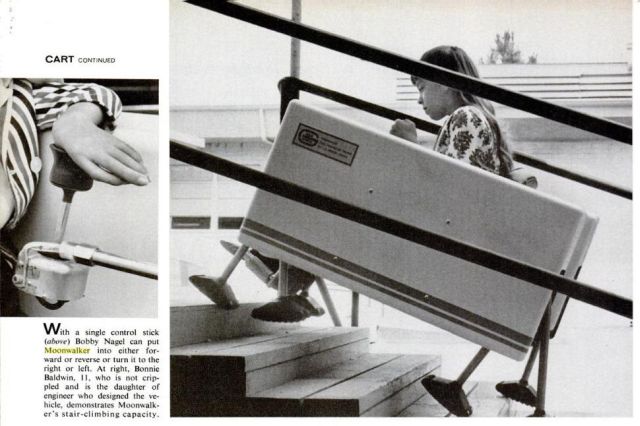
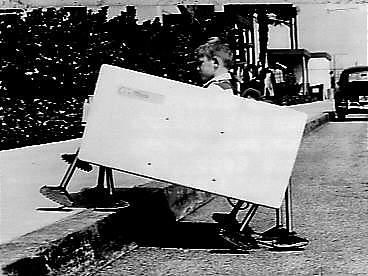
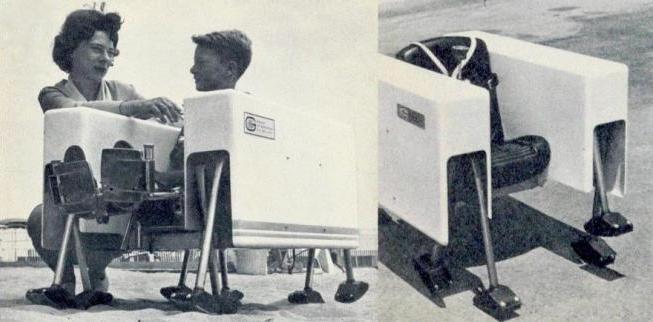
Months later, the day was saved by the remarkable conversion of the concept from a moon walker to an earth walker – indeed a walking wheel chair which had the ability to go up and down curbs and even flights of stairs! It was Jack Miller, who was acquainted with a researcher at the UCLA Child Amputee Prosthetics Center, who stumbled upon our savior. The UCLA research was sponsored by the well-known Rancho Los Amigos clinic/hospital which is dedicated to serve such children by developing and testing devices to improve their quality of life. Through discussions and negotiations, Jack convinced them that we could design a walking wheelchair which could not only operate at acceptable speeds on the flat and normally – encountered slopes, but which could also easily and safely negotiate staircases and confined spaces with simple controls joy-stick type controls. They were enthusiastic and contracted with us for three such walking wheelchairs.
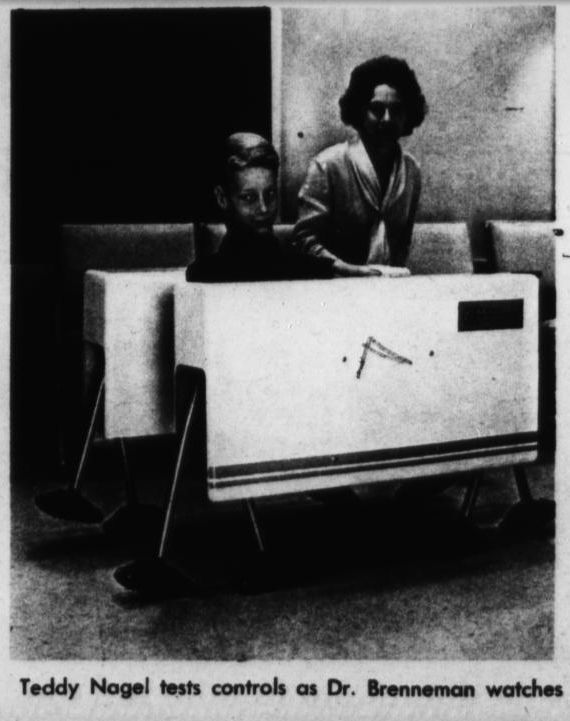
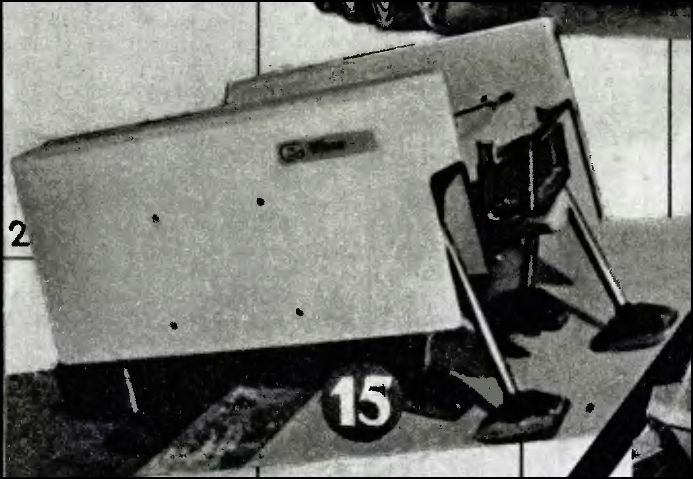
This time the team came up with an eight legged open-cockpit walker whose four pairs of legs were located where the wheels of a child-carrying sports car’s wheels would ordinarily be. It required two battery-driven electric motors, one for each side. The motors drove the leg-pairs through a bicycle-like chain sprocket system. Turns were made by differentially speeding up one side relative to the other, and turns on a dime were possible by reversing leg motion on one side. The whole effect was a natty speedster begging for the kids to apply a full regalia of car names and stickers worthy of an Indy racer.
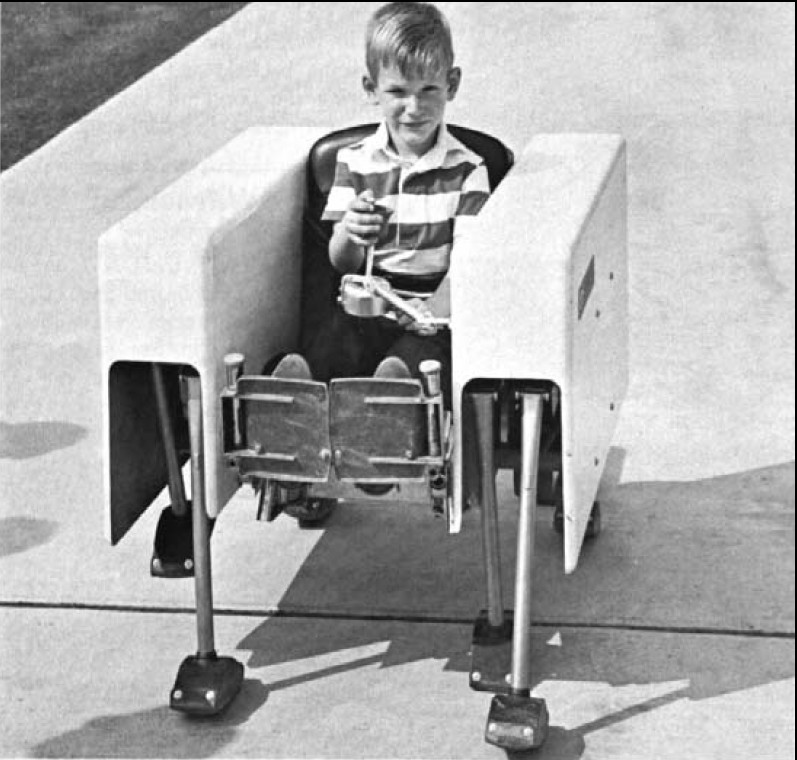
THE WALKING WHEELCHAIR –THE KIDS LOVED IT!
The kid test drivers reported that they loved them – but, alas, they could not whip down corridors as fast or do wheelies like they could with their conventional electric chairs. One seven year old pilot told me, “Yeah, it’s great on the steps, but I usually whip around turns at full speed by dragging on the wheel on one side. This tin can just can’t do that – it creeps!” To counteract this review, Jack and Al came up with a dual mode vehicle design which could exchange wheels with legs at the push of a button. But nothing came of this proposal.
A few years ago [c2003-RH], a Professor at USC who worked with Rancho Los Amigos told me that two of the three chairs, both bedecked with racing decals, were still operating and were still fun for the kids to drive. But, elevators and ramps are now common and in many cases required by law, thus alleviating the need for wheelchair curb and staircase climbing by the handicapped.

Above image from Unusual Locomotion.
See other early Steam Men and Walking Machines here.