Stair-climbing wheels
Wheels that shoot out spring-loaded "legs" enable an experimental British vehicle to climb stairs and other obstacles. The vehicle, powered by batteries, is the "miniclimber," developed by Prof. Meredith Thring and Brian Shayer at Queen Mary College, London University. The small machine travels at about three mph. On level ground, the weight of the miniclimber pushes the climbing legs back into a hub that's located alongside each conventional wheel. The developers foresee the climber's use by handicapped persons.
Source: Popular Mechanics, June 1967.
USEFUL ROBOTS

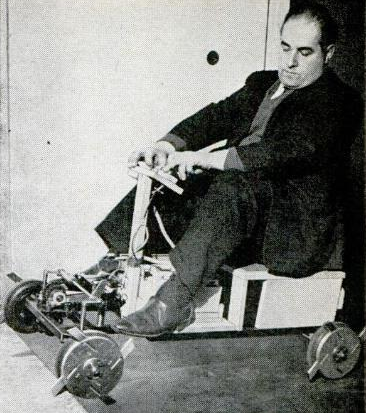
Click on above image to see Video clip of the Step-climbing carriage.

Towards the end of the Newsreel, Bernard (Bob) Morris sits in a step-climbing carriage; hooks come out of the wheels to pull the carriage up a small stairway; this was designed for the use of Thalidomide victims. [The British Pathe blurb on this newsreel incorrectly says the driver is Charles Ford when in fact it is Bernard (Bob) Morris. Thanks Andree McDade for this correction – see Comments below].


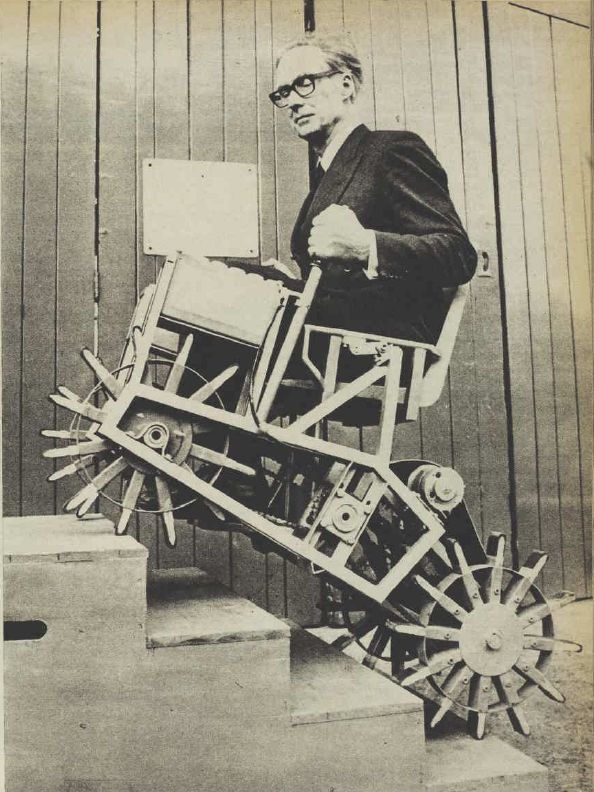
Prof. Meredith Thring with his Stair-climbing Chair.

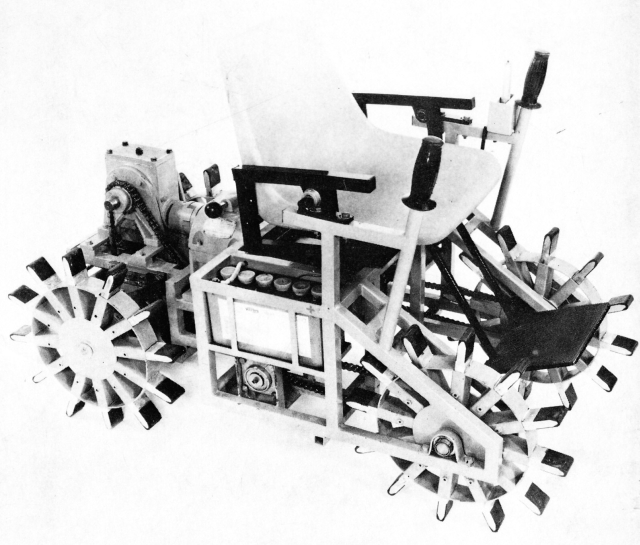
Fig. 6-11.
Source: Robots and Telechirs, M. W. Thring, 1983.
Thring has worked on an electrically powered carriage with three or four rimless wheels to enable handicapped people to climb stairs freely, which essentially places its spokes (rubber-tipped) on the step in front of it so that like a human foot it has no tendency to roll down the inclined plane formed by the corners of the step, because the weight is always carried on a horizontal surface.
The motion on the staircase is not perfectly steady because the point of contact of the spokes may be very close to, or even right on, the edge of the step, or it may be up to the distance between the spokes from the edge. However, it is considerably smoother than any system which rolls along the step and then climbs up to the next one, and there is a certain smoothing effect between the front and rear wheels.
Figure 6.11 shows an early working model of this kind of machine with four driven wheels having twelve rubber tipped spokes on each. By having driven front and rear wheels it gradually changes angle as it comes to the beginning and end of the stairs. If the spokes are too sharp they wear the rubber tips very fast, but if they are too thick they tend to come on the rounded corner of the step more often and can roll (on the downward movement) or slip (on the upward movement) on to the next step. The optimum number of spokes is also a very important consideration. The wheel should have a radius (when the spoke is loaded) slightly greater than the height of the highest step to be climbed, so that as it rolls forward on the step below the spoke comes forward on to the next step. If there are too many spokes the spoke always begins to lift from a point very close to the edge of the step-tread, and the smoothing effect of the edge going deep between the treads is lost. If there are too few, the reciprocating motion when going on the level ground at higher speed becomes excessive. Twelve spokes give noticeable oscillation at 3 m.p.h. on the level. The amplitude of the oscillation is inversely proportional to the square of the number of spokes, so 16 or 20 would be better from this point of view though more expensive.
There are two problems which must be overcome in a final design.
(i) Stability. It is desirable that the seat carrying the person shall tilt so that this seat remains approximately horizontal when the chair ascends or descends stairs. If the chair is pivoted about a point above the centre of gravity of the person so that this levelling is automatic on the pendulum principle, then his weight will be thrown in the downstairs direction on the tilting of the chair, making the system fundamentally unstable. It is, therefore, necessary to tilt the seat about a pivot close to the ground or to slide the seat upstairs as the carriage tilts. In either case the weight has to be lifted and thus the levelling mechanism must be powered, unless the movement is carried out by the driver before reaching the stairs at the same time as he changes to low gear for stair-climbing. It is also possible to have front- and rear-wheel drive only when in the climbing mode.
Steering.
Steering a system of this type requires front- and rear-wheel drive when it is climbing stairs. Moreover, it should have very good mobility corresponding, if possible, to complete rotation about an axis within the framework. This rules out conventional steering methods unless the driven front wheel can be rotated up to 90° in each direction, a proposal which is being explored at UNAM in Mexico.
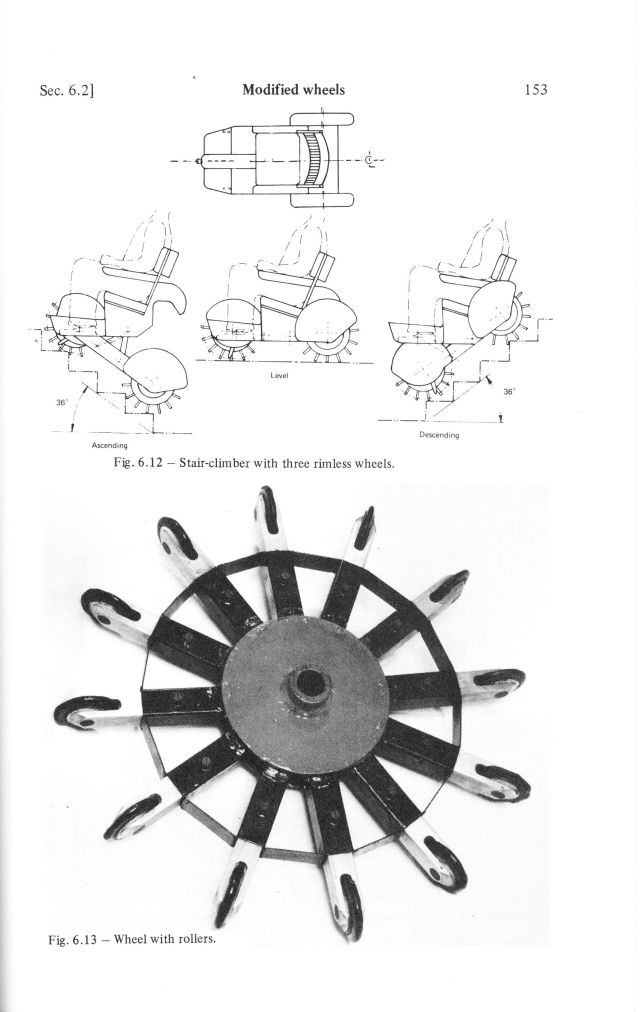
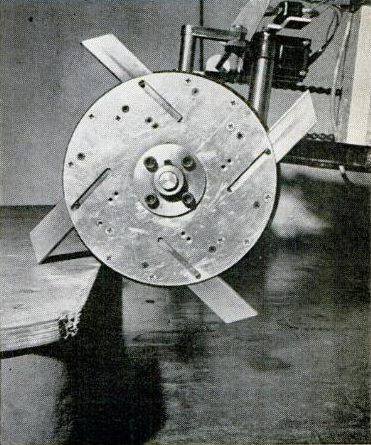
My own solution is shown in Fig. 6.12. It is preferable to have only three wheels because, when climbing a spiral staircase, which is not a plane surface, a four-wheeled system would require very soft springing to adapt to the surface. By making the front wheel with rollers at the end of all the separate spokes (Fig. 6.13) this wheel will give positive drive for moving forward, but can roll freely sideways. Thus, if the two rear wheels are driven by separate motors, which can be reversed, and the front wheel is driven by a differential gear so that it runs at the arithmetic mean of the speeds of the two rear wheels, it is then possible to rotate about the mid-point of the back axle. The front wheel need not be driven except in the climbing mode and the drives to the rear wheels have to be reduced by a 6:1 ratio mechanical gear in order to give the necessary increased torque.
See Thring's other things here.
See other Walking Wheels and Walking Machines listed here.
1964c – Walking Wheel Stair Climbers – Meredith Thring (British
Hi just wanted to say that your website has been so useful as I wanted to find information on the above as my uncle Bernard Morris worked with Prof Thring as his technician; in fact the photo is not Charles Ford but Bernard Morris my uncle – Bernard (Bob) Morris. He passed a few years ago – survived by his wife – I will be showing this and the Pathe news clip to her – it is so good to see ; would be great if you could change the name to Bernard Morris for this picture – I could find a photo of him to send you – just to prove it is my uncle.
Thanks again
Andree McDade