Source: How to Invent: M.W. Thring and E.R. Laithwaite, 1977.
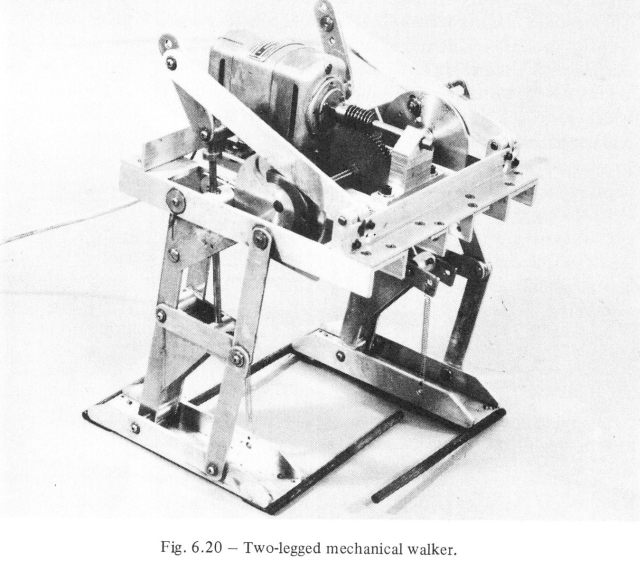
In the first stage of an attempt to make a powered artificial leg I analysed the essential mechanism of human walking and produced the device shown above which walks on two legs by bending the knee as the thigh begins to swing forward and straightening it as it begins to swing backward.
USEFUL ROBOTS

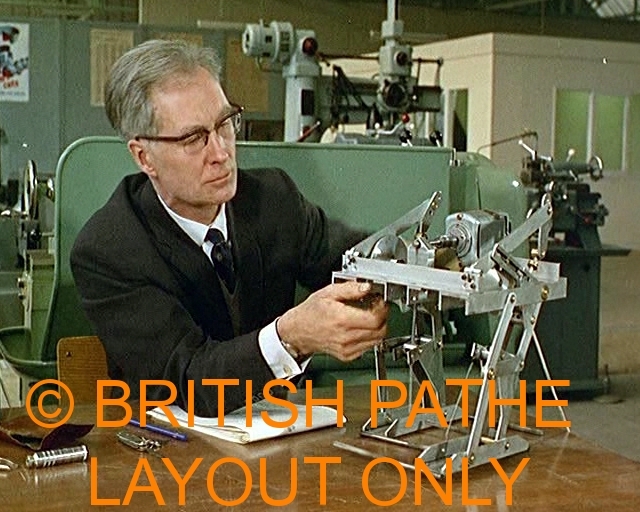
Thring with 2-legged walker.
Prior to the above electric-powered walker, Thring built a compressed-air powered mode.
Source: Robots and Telechirs, M.W. Thring, 1983.
Figure 6.26 shows the linkage mechanism used by Thring in some early studies for a powered orthotic or prosthetic leg. This consists of two parallelograms so that two pneumatic cylinders can provide the whole walking movement and the foot is maintained parallel to the ground. The upper cylinder swings the leg by changing the diagonal of the upper parallelogram, while the lower one lifts the foot by bending the knee.
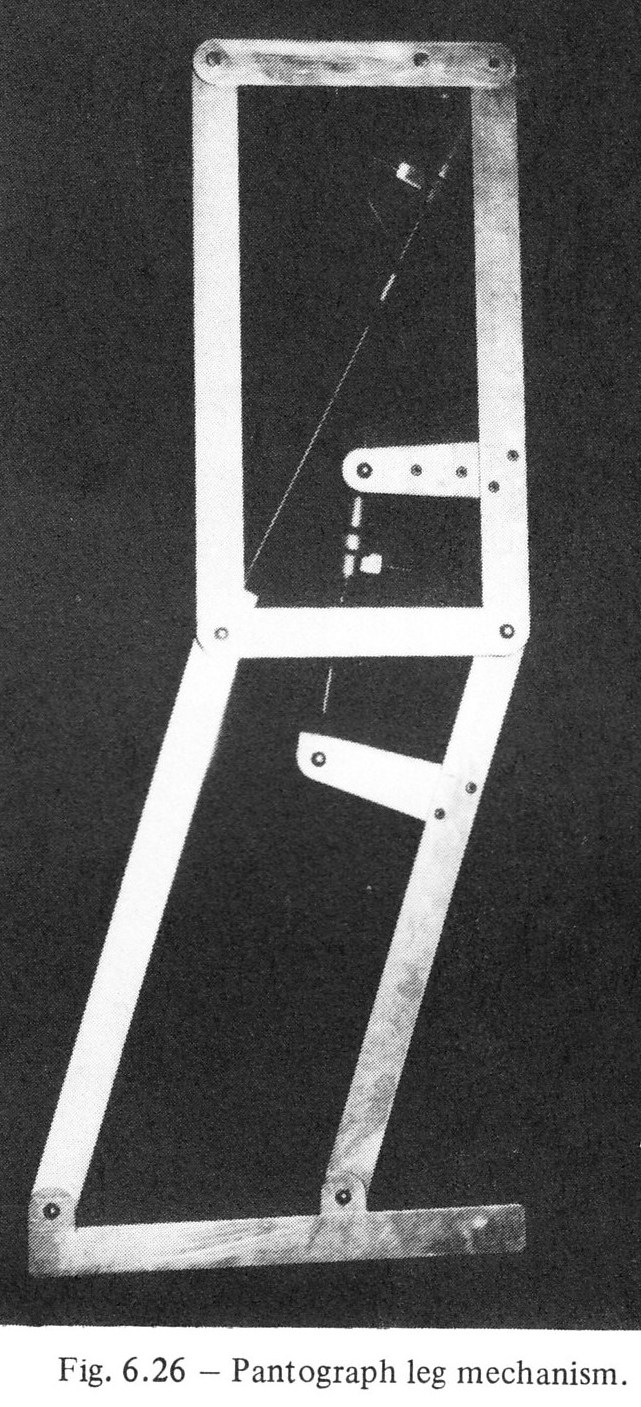
Fig. 6.26 — Pantograph leg mechanism.
Source: New Scientist, 7 Mar 1963.
… when a domestic robot will take over the routine of running a house ….. the fortunate house-holder ought to be able to turn a switch and give the robot instructions to do everything. It will make the beds. change the sheets, dust the whole place. vacuum, clean the carpets, lay the table and clear it and look after other machines as well —it could be instructed, for instance, to feed the washing machine.
The machine would have to walk, not run on wheels, so that it could negotiate the edges of carpets and go up and down stairs. A mechanism for doing this has been developed at Sheffield. It works by a system of telescopic legs and feet and an extendable cantilever arm. Professor Thring showed a film of the machine, powered from a compressed air line,
coming down a flight of steps and then propelling itself along the flat, rather like a monkey taking the weight on its knuckles and swinging its back legs forward.