There are at least two variations of the walking machines attributed to Prof. Joseph E. Shigley, then from the University of Michigan. The first relates to the pantograph leg with some descriptions suggesting up to 16 legs were to be used – 4 gangs of 4 legs so a leg was on the ground at any one time.. The second being a walking tank for the US Army.
.jpg)
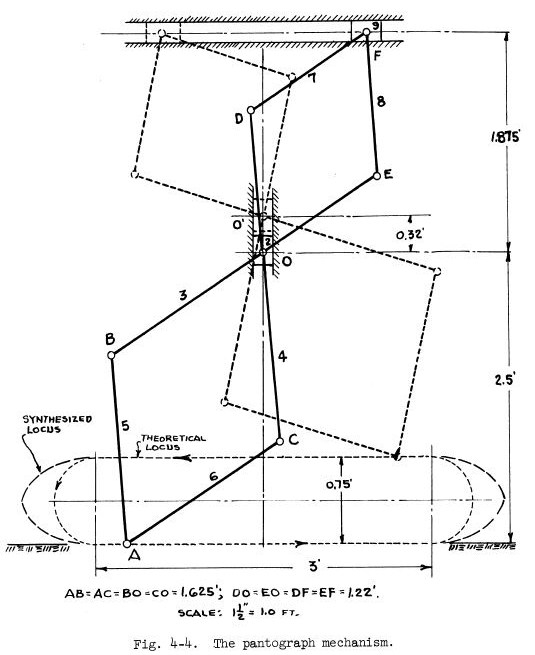
For balance and to ensure a foot is on the ground at all times, each corner of the vehicle would have a gang of 4 pantograph legs.
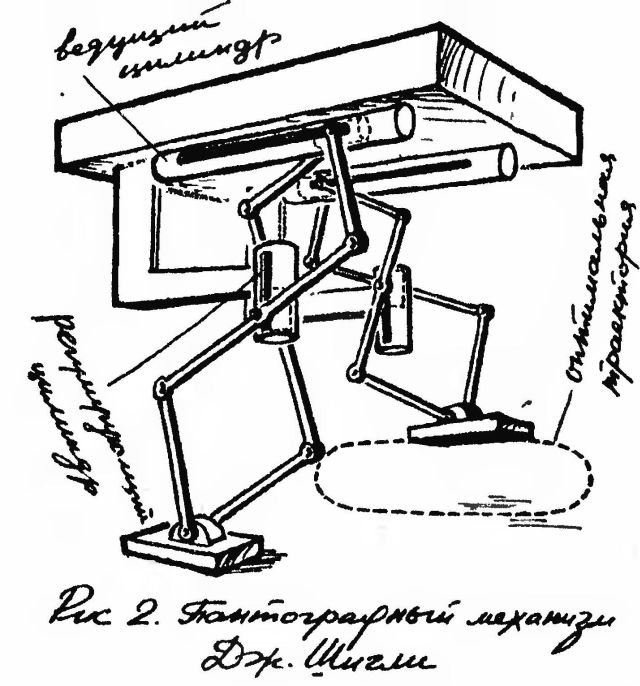
Russian representation of Hydraulic legs.
Shigley's document (see pdf below) describes configurations for both walking machines mentioned here.
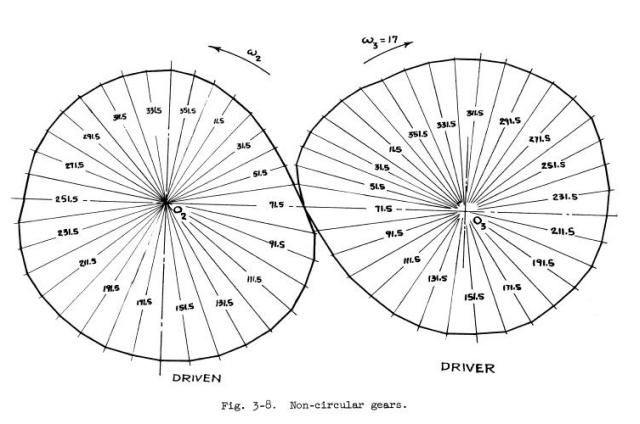
The earlier tank design was actuated by 'egg' shaped gears to accelerate into position the un-loaded leg. This was perceived as complex hence costly, and was abandonded for hydraulic actuation instead.
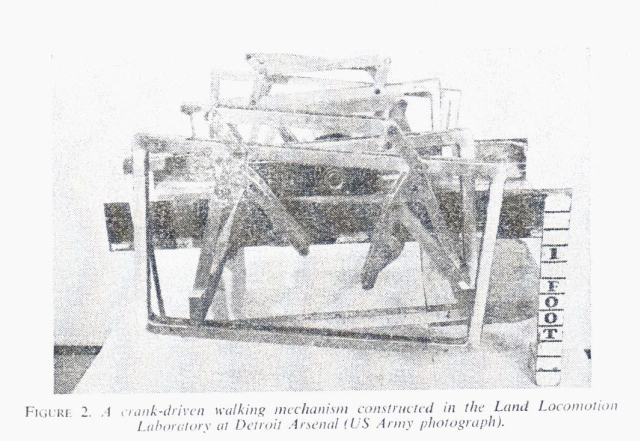

Illustration being an interpretation by Popular Science magazine illustrators on how the "legs" would be applied to an Army tank..

pdf 1. Mechanics of Walking Vehicles – Shigley 1960.
pdf 2. Tanks that Walk and Jump – Popular Science- July 1960.