
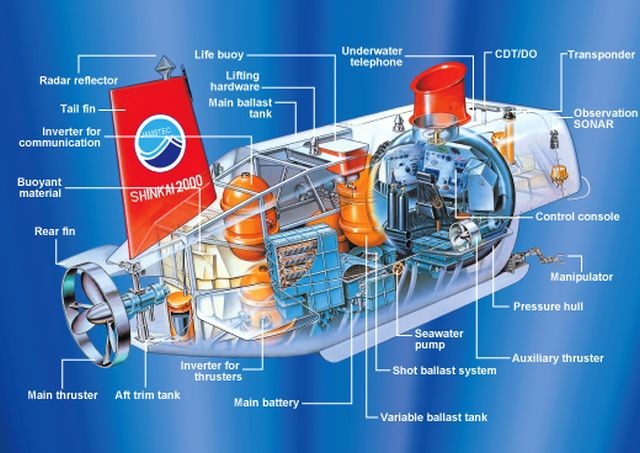
Model of the Shinkai 2000 showing a single manipulator with 6 degrees of freedom.

"SHINKAI 2000" is the first manned deep submergence research vehicle in Japan, with a maximum operating depth of 2000 m and a weight of 23t. The Vehicle was designed and constructed in Kobe Shipyard and Engine Works, MHI and was delivered to JAMSTEC in Oct. 1981 after sea trials and has now engaged in deep-sea research activities after training. This paper presents the outline of design and operation including after the delivery. presents the outline of design and operation including after the delivery.
DESIGN OF "SHINKAI 2000"
"SHINKAI 2000" (the Vehicle) is carried to the area of submergence on board "NATSUSHIMA" (the Support Ship) and is supported by her in various fields such as inspection and maintenance before and after dive, launching and retrieval, positioning, tracking and communication.
Its pressure resisting structure is composed of the ultrahigh strength steel pressure sphere accommodating the crew, three titanium alloy pressure vessels storing electronic equipment and a variable ballast tank.
Main components such as batteries, distributors, hydraulic system and motors for thrusters which are of oil-filled pressure compensated type, and syntactic foam, which compensates the vehicle weight with its buoyancy, are installed in the exostructure of pure titanium and are covered then with GRP panels.
In the pressure sphere the control console for operation and monitor by one-man control, life support equipment, etc are installed. Near the seabed, searching visually, photographing, collecting samples by the manipulator, etc, are performed while observing closely through a viewport by one-man control.
Estimated time spent in the mission of 2000 m depth is 8 hours: 1 hour for launching, 1.5 hours for diving, 3 hours for seabed research, 1.5 hours for surfacing and 1 hour for retrieval. But by skilled operation, time for seabed research can be increased by decreasing time for other phase operations.
Source: here.
See other early Underwater Robots here.