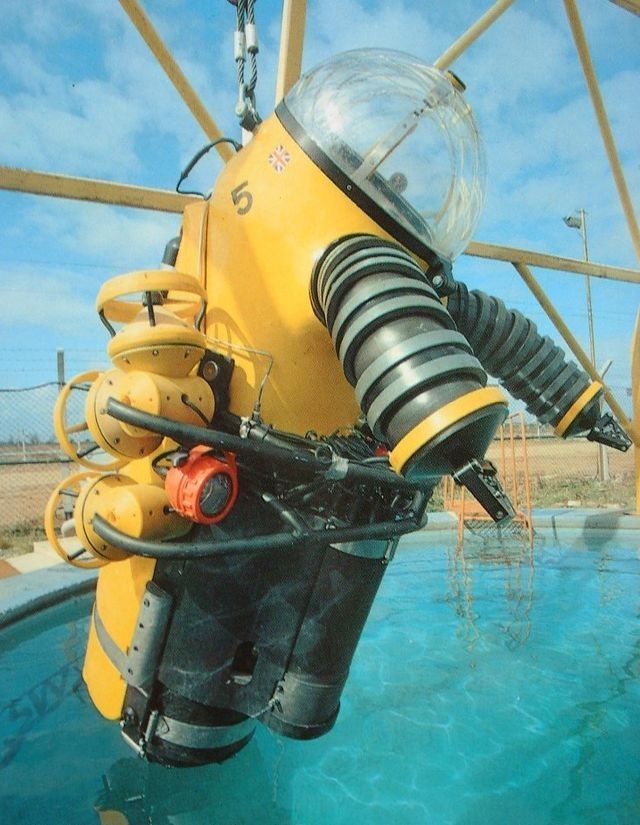
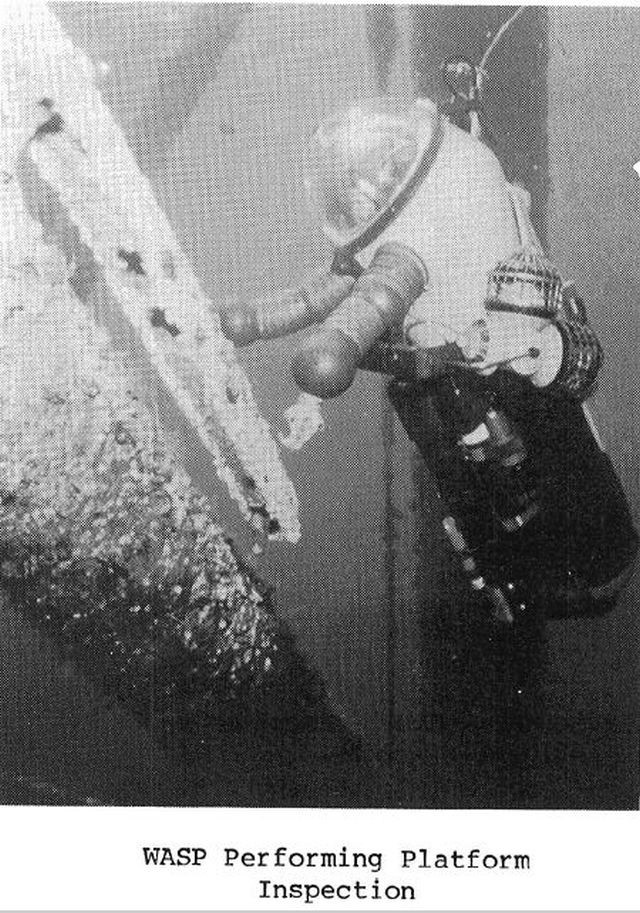
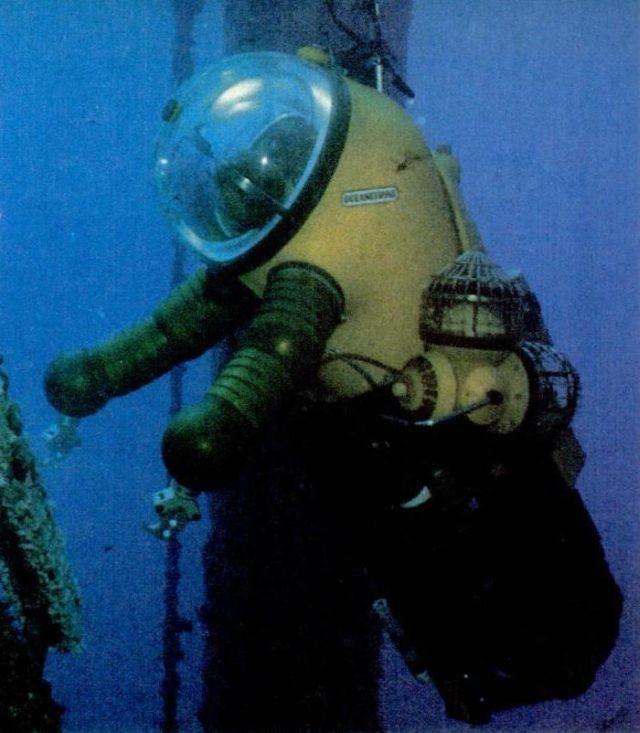
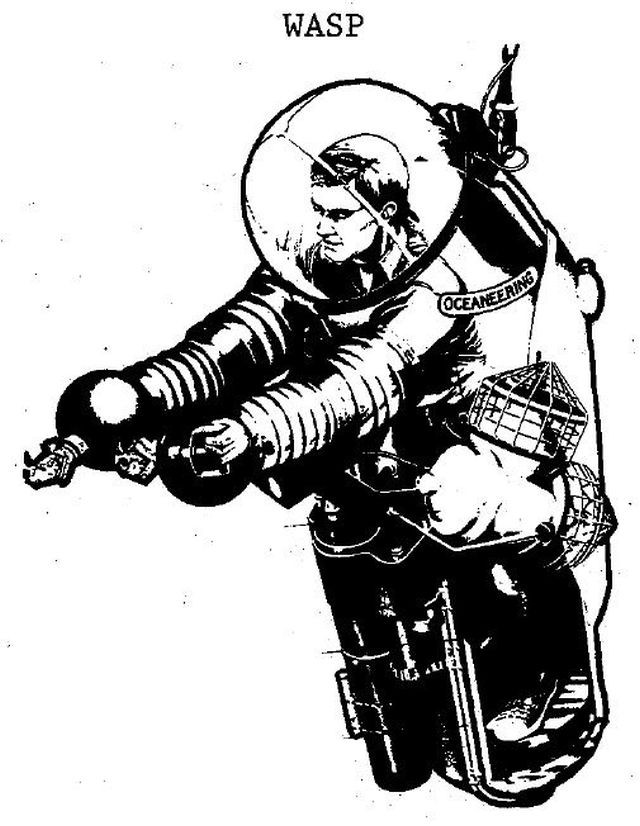
WASP – A mid-water unit using thrusters and a tubular lower body section rather than articulated legs.

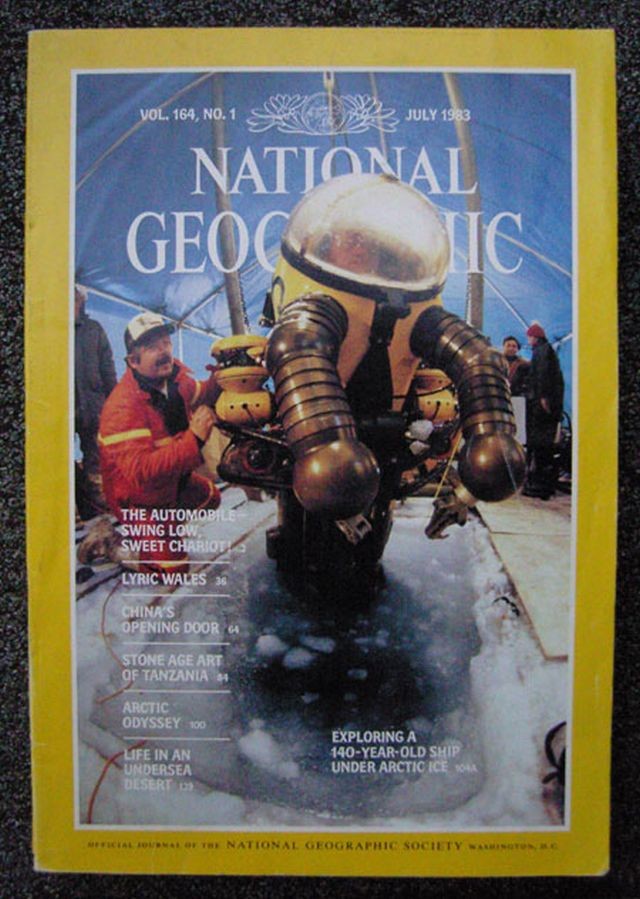
Wasp, built by OSEL, Offshore Submersibles Ltd., U.K. The Wasp may be regarded as the next development step in that it maneuvers by the use of four hull-mounted thrusters. Essentially it is a one-atmosphere, armoured diving suit without legs. The Wasp has a depth capability of 610 m and has been used for drilling support since 1978.

Graham Hawkes inside a WASP suit.
See Wasp 1:24 into clip.





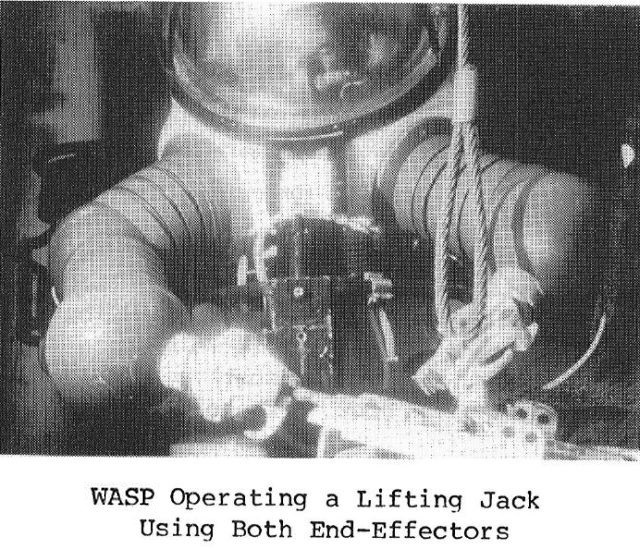



The Manipulator/Limbs are aluminium construction, fully articulated, fluid-supported flexible arms with direct acting manipulators.

Models of WASP.



WASP – The WASP is a new-comer to the ADS Service line and essentially comprises a standard ADS upper body and vision dome system with tubular lower body. The unit is fitted with rotatable thrusters and "flys" in a manner similar to the most maneuverable of the current crop of small manned submersibles. The unit is fitted with the type 3 SAM arms and manipulators. Since WASP in not as widely known as "JIM", it may be appropriate to discuss the design and working concept in some detail.
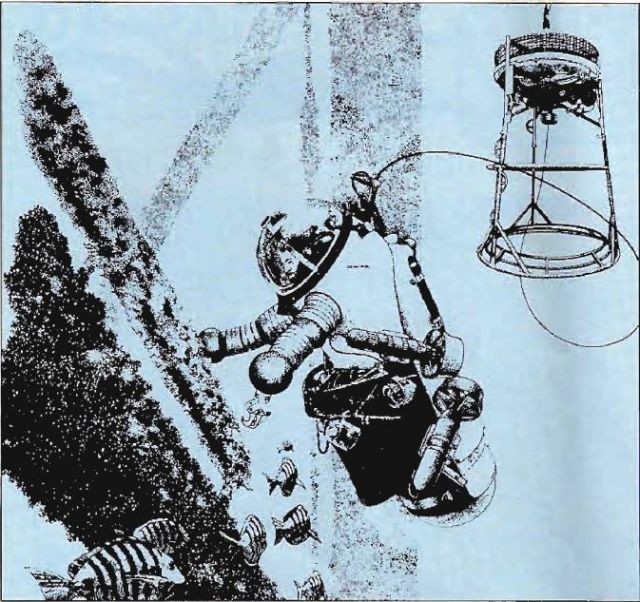
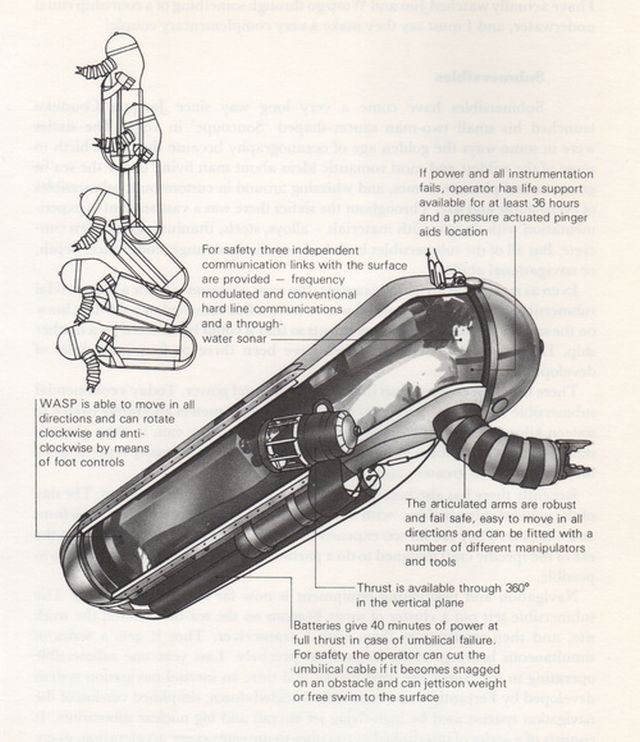
The WASP unit nay be viewed as a hybrid between a very small submersible and the standard ADS articulated system. WASP is designed to work at depths up to 2,000 feet and receives power for its thrusters through a small diameter surface umbilical. A unique feature is the on-board battery system which acts as a buffer to allow spurts of full power that the umbilical would not be capable of supplying. In addition, the battery system acts as a safety device in that it provides for self-contained operation for nearly one hour, should the umbilical be severed. The umbilical can be detached from inside the WASP and the operator can surface using thruster power, or make a buoyant ascent by jettisoning ballast.
The WASP unit can alter buoyancy and altitude and is able to assume virtually any position by use of the rotating thruster. Since the operator has his arms occupied during work tasks, the unit is designed to be controlled by foot pedal motions similar to those used in driving a motor vehicle. WASP was designed by Graham Hawkes, an engineer who worked extensively with the JIM systems.
Note: The article was written by Phil Nuytten, co-founder of Oceaneering International. Nuytten later left Oceaneering and set up another company to build the HARDSUIT and EXOSUITs.
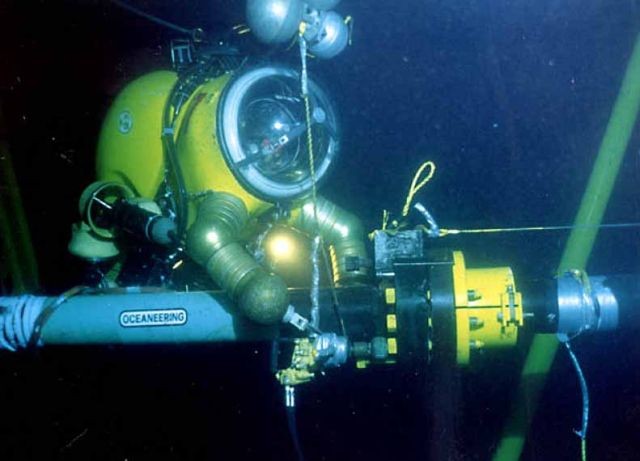
Oceaneering's Wasp was originally designed by Graham Hawkes and built by Osel Ltd in the mid-1970s. Currently, there are seven Wasp 2As in service, and two under development, to be known as the WASP 3.
See other early Underwater Robots here.