
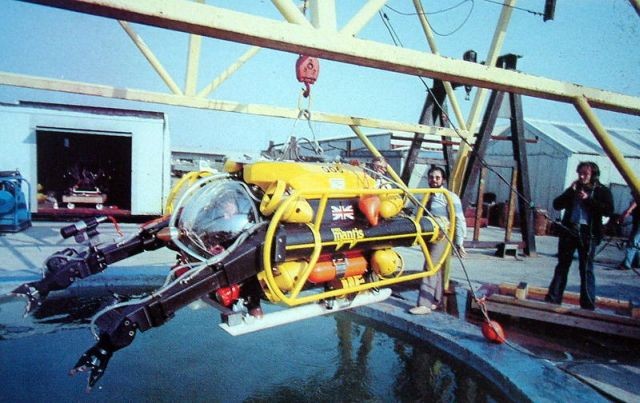
1978 – "Mantis" Submersible.
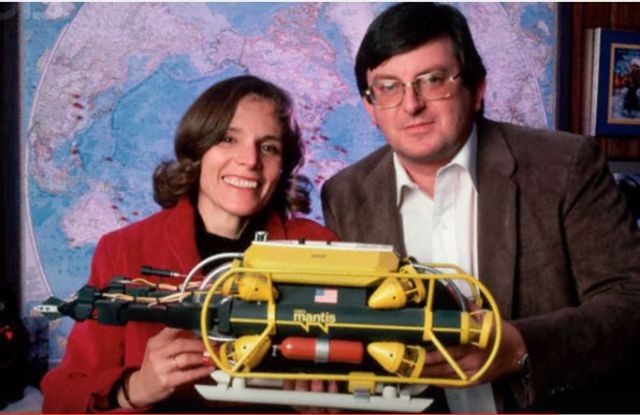
Sylvia Earle and Graham Hawkes.
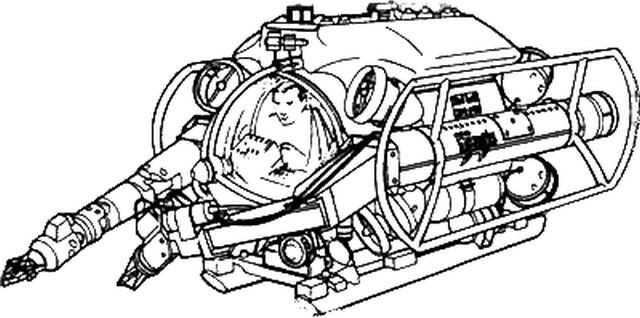
Mantis, built by OSEL, U.K., designed by Graham Hawkes is the latest [c1978] development in the tethered submarine field. It is fitted with eight or ten electric thrusters and has two seawater hydraulically operated manipulators. The Mantis was built in 1978 and has been used for rig inspection and debris clearance operations.



See other early Underwater Robots here.
Hi James, All images found on the net. Some from http://www.dreamstime.com/editorial-stock-photo-submarine-mantis-one-man-rescue-vehicle-used-to-cut-away-debris-rescue-can-be-effected-image48631068 .
My father worked for OSEL from the early days machining most of the parts for the Mantis, Wasp and other ROV’s I remember visiting the site and the pool. Where are the pictures from?
this is awesome