Publication number US1370590 A
Publication type Grant
Publication date Mar 8, 1921
Filing date Dec 2, 1918
Priority date Dec 2, 1918
Inventors Josef Kamieniecki
Original Assignee Josef Kamieniecki
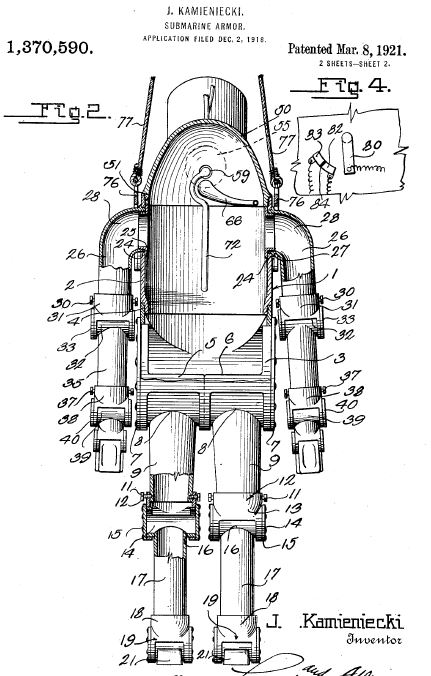
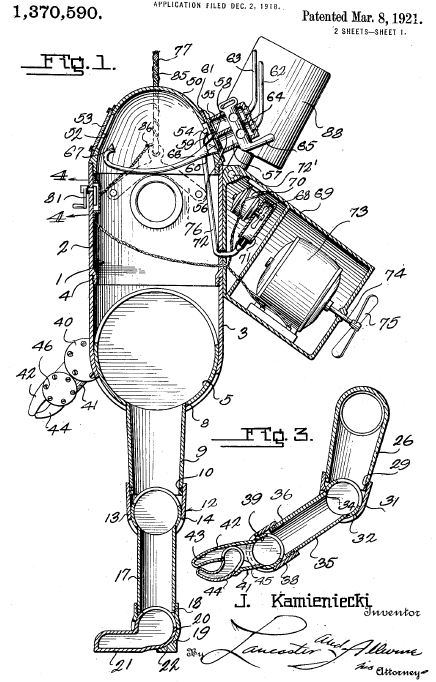
This invention relates to submarine or diving armor, and more particularly to a metal sectional armor of this type which by reason ot its strength and rigidity is particularly adapted for use in deep sea diving, and an object of the invention is to provide a metal submarine armor which is flexible at its joints or connections under actual working conditions in order to enable the diver, when incased in the armor to have ready use of his arms, hands and legs for performing his necessary duties.
A further object of the invention is to provide a submarine armor as specified, in which the air circulating system embodies a valve casing carried at the rear end of the helmet of the armor, which casing has an inlet chamber and an exhaust chamber with the passage of air therethrough being controlled by flap valves, so as to prevent the passage of exhaled air into the inlet compartment and also to provide a valve mechanism in the said casing whereby the air may be cut off, in case the hose becomes broken, to prevent the flooding of the interior of the armor, and further to provide a relatively small electric fan carried by the armor and having its exhaust arranged for passage into the exhaust or exhaling chamber of the said valve casing, to create an air suction through the armor and maintain fresh and clean air within the helmet of the armor at all times, by drawing the used or exhaled air into the exhaust or exhaling compartment and forcing it outwardly through the outlet or exhaling tube of the ventilating system.
A further object of the invention is to provide means in connection with the submarine armor as specified, which will permit the diver to rise through the water, independently of the usual type of joint employed for this purpose, which means include a propeller and a suitable prime mover therefor, the operation of which is controlled by the operation of a switch at the front of the body portion of the armor, whereby the diver can, at any desired time, operate the switch to permit the operation of the propeller to force him upwardly through the water.
A still further object of the invention is to provide an armor as specified in which the arm and leg inclosing sections are detachably connected to the body section to permit their quick and easy removal or disconnection irom the body to facilitate the placing of the suit upon a diver and also to provide easily operated means for connecting these sections to the body section by fluid tight joints.
No evidence to date has been found that would indicate that this suit was built.
It would take until 1978 when the WASP, similar in design to the JIM suit except that below the waist it has a glass reinforced plastic cylinder in place of articulated legs, that we would see small multi-directional thrusters, controlled by foot pedals within the cylinder, giving the WASP more mobility. Although the developers of the JIM suit experimented with a thruster-pack earlier, the WASP was the first suit to successfully apply thrusters, allowing the ADS a mid-water capability not present before.
See other early Underwater Robots here.