The Flexible Robot Arm P.O.W.E.R.
Introduction
The Personal Occupied Woven Envelope Robot (P.O.W.E.R.) project is a joint effort of the University of Alabama in Huntsville (UAH) and Wyle Laboratories. This work is being performed under the Innovative Research Program for NASA.
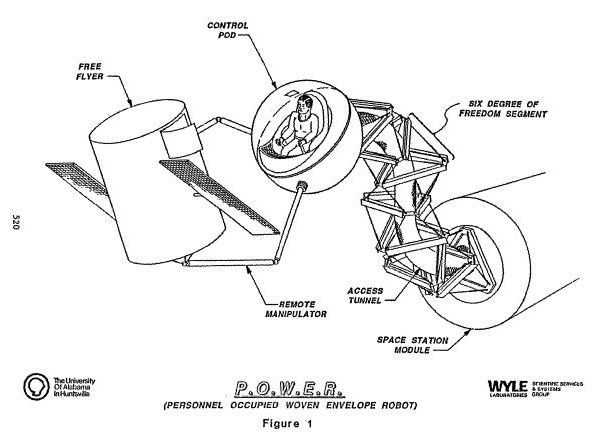
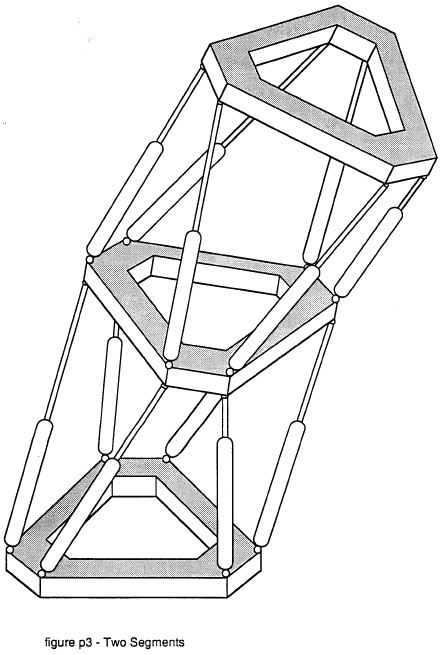
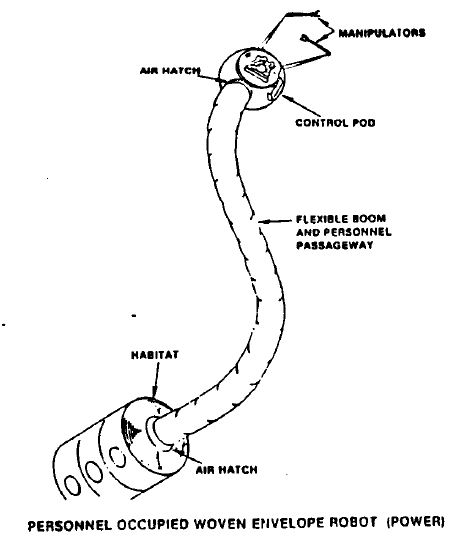
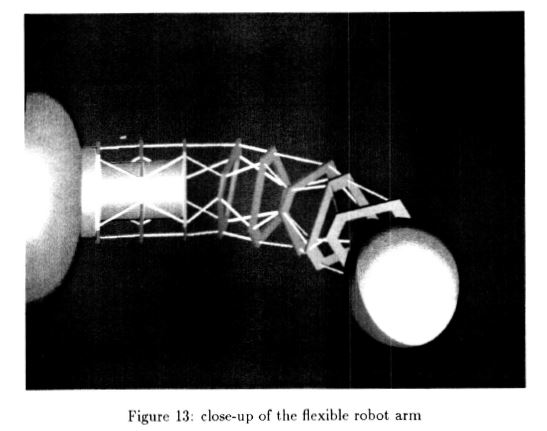
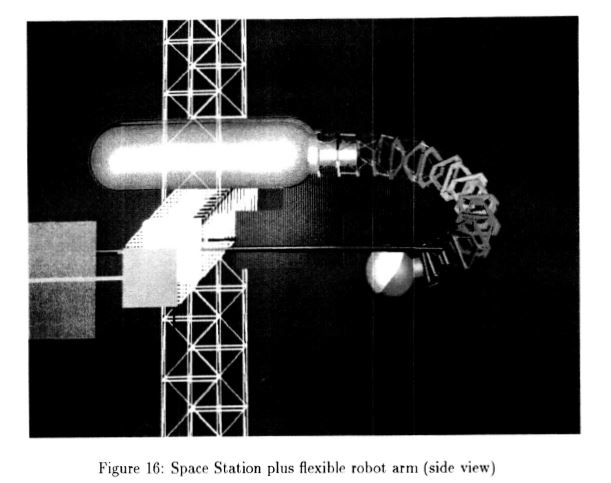
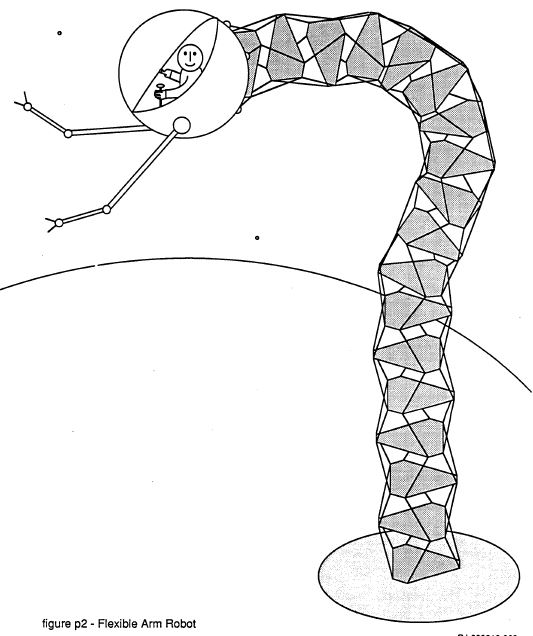
POWER is a flexible robot arm. It will be used as an "extension" of the Space Station. POWER consists of 50 segments, and each segment has six degrees of freedom. The segments are based on the Stewart Table, which has six linear (individually controlled) actuators. A control pod is attached to the top of the flexible robot arm. A flexible tunnel connects the control pod to the habitat module of the Space Station, allowing a person to transfer from the Space Station to the pod without having to suit up for extra vehicular activity. The operator of the pod is able to move himself and the pod to almost any location within 50 meters of the base attachment to the Space Station. The operator has at his disposal remote manipulator arms and also a glove box type arrangement with space suit arms so that he can perform manipulations on equipment external to the pod.
Some of the applications of POWER are:
• Changing out and servicing payloads on the payload platform.
• Maintaining subsystems such as propulsion and attitude control.
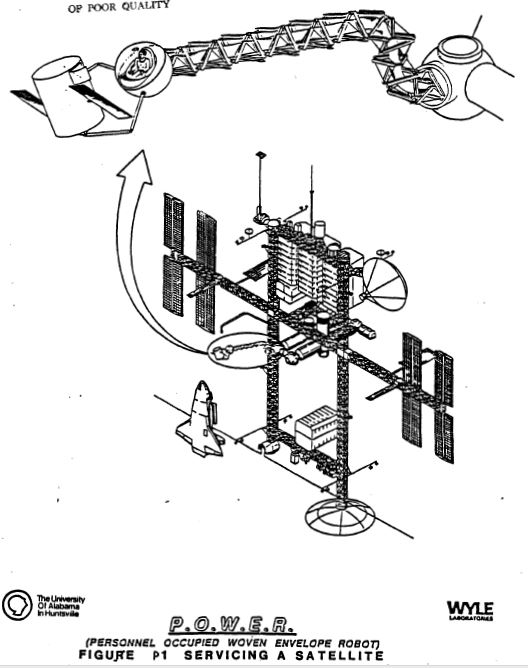
• Providing satellite service.
• Performing inspections.
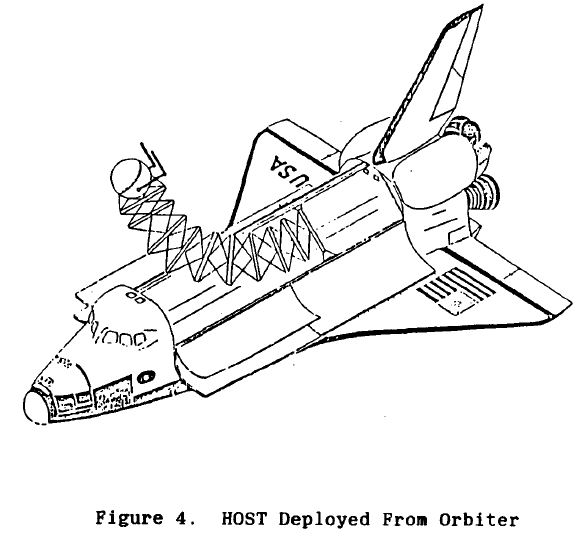
• Supporting shuttle cargo bay operations.
• Performing remote control operations for hazardous duty.
• Capturing satellites during final approach.
See other early Space Teleoperators here.
See other early Lunar and Space Robots here.