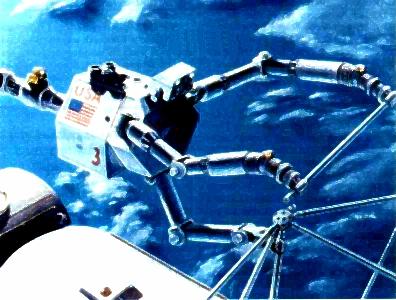
The flight telerobotic servicer, or FTS, was conceived as a means of incorporating U.S. robotics technology on Space Station Freedom. The U.S. Congress was interested in advancing both robotics and automation technology for the benefit of the Station, as well as directing spin-offs to the U.S. economy. In addition to ensuring technology transfer between various U.S. industries, the FTS would also serve to provide telerobotics assistance to early Station assembly tasks, service attached scientific payloads, and serve as a telerobotic assistant to EVA crewmembers.
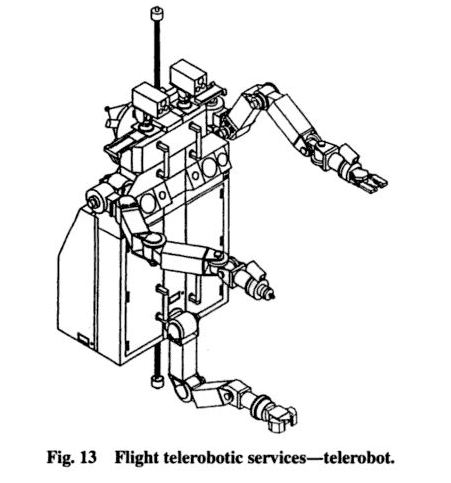
The prime contract to manufacture the FTS was allocated to Martin Marietta Corp. with NASA's Goddard Spaceflight Center (GSFC) serving as the technical/managerial lead for integration onto the Space Station. The FTS was scheduled to fly as part of the Station's first element launch package in 1995, but the FTS program was terminated in 1991 because of SSF budgetary cutbacks. Figure 13 shows the final FTS concept.
Source: Teleoperation and Robotics in Space, ed. by Carl F. Ruoff, 1994 .

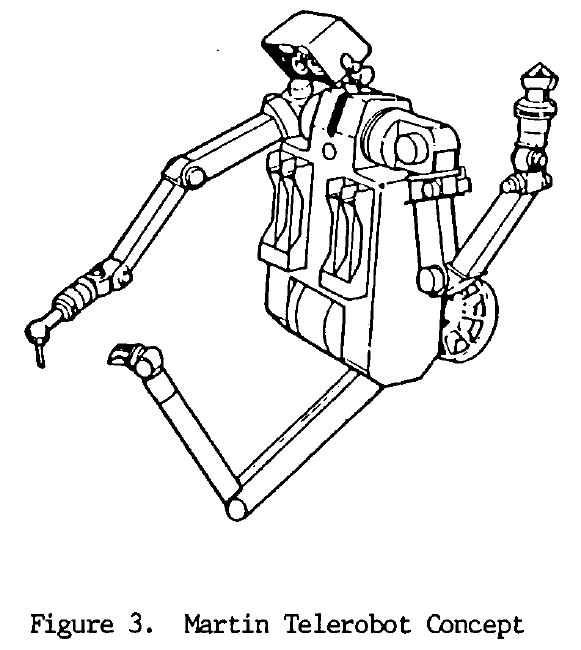
NASA decided to develop a $288-million FLIGHT TELEROBOTIC SERVICER in 1987 after Congress voiced concern about American competitiveness in the field of robotics. The FTS would also help astronauts assemble the Space Station, which was growing bigger and more complex with each redesign. Martin Marietta and Grumman received $1.5-million study contracts in November 1987. Shown here is the winning design by Martin Marietta, who received a $297-million contract in May 1989 to develop a vehicle by 1993. Grumman were losing finalists. The Bush Administration briefly tried to commercialize the FTS project in early 1989. The contractors objected since the FTS had no commercial customers.
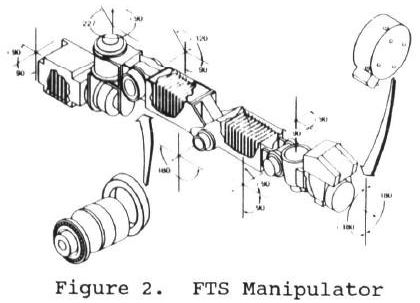
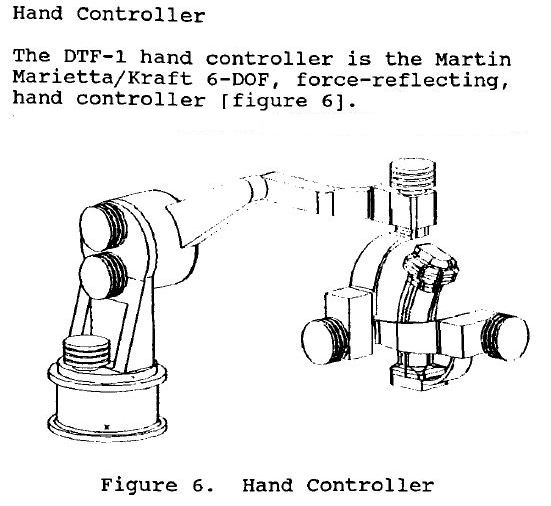
The DTF-1 manipulator as used on the FTS. It has 7 degrees-of-freedom and is approximately 5.5 feet long from the shoulder to the toolplate.
The FTS concept was no longer necessary after the Space Station in-orbit assembly procedures were greatly simplified in 1990-91.
See other early Space Teleoperators here.
See other early Lunar and Space Robots here.