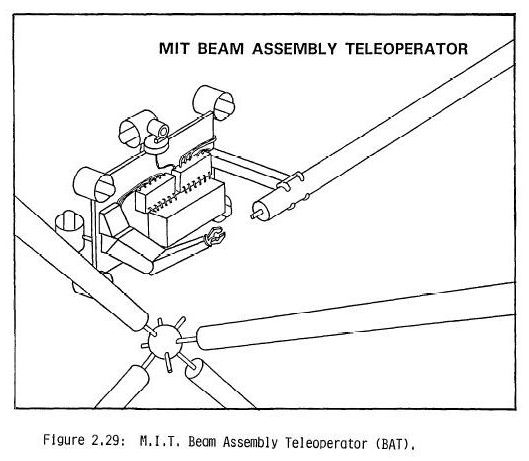
1983 M.I.T. Beam Assembly Teleoperator (BAT)
The SSL was founded in 1976 at the Massachusetts Institute of Technology. Its early studies in space construction techniques eventually led to the EASE (Experimental Assembly of Structures in EVA) flight experiment which flew on Space Shuttle mission STS-61B in late 1985. EASE was designed to evaluate the ability of astronauts to build structures in space.
The success of EASE led to questions about how well robots could construct structures in space. The SSL’s first neutral buoyancy robot, the Beam Assembly Teleoperator (BAT), was built in 1983 specifically to construct the EASE structure. Over BAT’s lifetime, SSL personnel accumulated a large database comparing human and robot performance in space. BAT also demonstrated the ability of robots to assist astronauts during EVA excursions and to service and repair satellites.

 Â Â Â
The Beam Assembly Teleoperator (BAT) was designed to assemble the same structure used by the Space Systems Laboratory for the Experimental Assembly of Structures in EVA (EASE) program. EASE involved two pressure-suited subjects repeatedly assembling a six-element tetrahedral truss, and included both neutral buoyancy simulation and a shuttle flight experiment flown on STS 61-B in late 1985. By choosing as a design case to assemble this same structure, direct comparisons could be made between EVA and the telerobotic assembly, as well as correlation to the flight experiment. This structure was designed to be challenging for EVA assembly; no major modifications in the structure were allowed for simplifying the task for robotic assembly. Thus, BAT was designed from the outset to be as capable as EVA for this one specific assembly task, and generically capable of a variety of other EVA tasks as well.
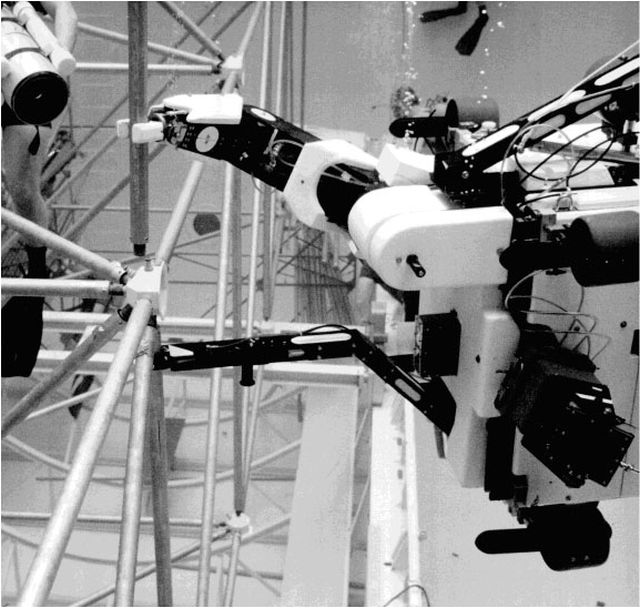
The basic design of BAT was based on a self-contained mobility base, with vision and manipulation systems attached. The mobility base contained the control electronics, on-board power supplies, and the other support systems, as well as eight electrically-powered ducted propellers for underwater motion. Careful attention has to be paid to simulation fidelity in the neutral buoyancy environment, and floatation panels and trim weights were attached to the base unit to adjust the centers of buoyancy and gravity to be coincident, such that the vehicle has no preferred orientation. In the current configuration, BAT is equipped with two pairs of stereo monochrome video cameras, one five degree of freedom dexterous general purpose manipulator, a non-articulated grappling arm for grasping the structure under assembly, and a specialized manipulator for performing the coarse alignment task for the long struts of the truss assembly. This combination of a flexible, generalized manipulator and “pick and place” specialized manipulator for selected tasks proved to be a useful approach to the design of a structural assembly telerobot.
“The Space Systems Laboratory (SSL) is dedicated to making human beings more productive while working in space. We believe that both humans and robots, working together, are necessary to accomplish this goal. We are currently developing robotic systems capable of assisting astronauts in EVA (spacewalk) tasks, thus making EVA excursions shorter and safer, and in some cases allowing astronauts to perform tasks that would otherwise be impossible. We also study the ways the human body works in space, quantify human abilities in orbit, and design tools and systems to help astronauts work in space.
The SSL was established in 1976 at the Massachusetts Institute of Technology by MIT faculty members Renee Miller and J.W. Mar. Its early studies in space construction techniques eventually led to the EASE (Experimental Assembly of Structures in EVA) flight experiment which flew on Space Shuttle mission STS-61B in late 1985. EASE was designed to evaluate the ability of astronauts to build structures in space.
Other early SSL work with Richard Stallman and Marvin Minsky resulted in the Aramis study, an early influential paper on the use of automation in space exploration. In addition, the SSL developed the first neutral buoyancy version of a Manned Manuevering Unit, which allows astronauts to fly untethered around the Space Shuttle. NASA now uses SAFER, a similar device, to ensure the safety of astronauts during EVA excursions.
The Space Systems Lab was founded at MIT in 1976, by faculty members Renee Miller and J.W. Mar. Its early studies in space construction techniques led to the EASE (Experimental Assembly of Structures in EVA) flight experiment which flew on Space Shuttle mission STS-61-B in 1985.
In 1990, lab director Dr. Dave Akin moved the lab to the University of Maryland. The Neutral Buoyancy Research Facility, or NBRF, was completed in 1992. Current projects include the MX suits, simplified spacesuits for use in EVA research; Exo-SPHERES, a prototype satellite for inspection missions, and DYMAFLEX, a light-weight high performance manipulator developed for controls testing in a highly coupled dynamic environment.
The Space Systems Laboratory (SSL) is part of the Aerospace Engineering Department and A. James Clark School of Engineering at the University of Maryland in College Park, Maryland. A leader in the area of astronautics, the Space Systems Laboratory is centered around the Neutral Buoyancy Research Facility, a 50-foot diameter, 25-foot deep water tank that is used to simulate the microgravity environment of space. The only such facility housed at a university, Maryland’s neutral buoyancy tank is used for undergraduate and graduate research at the Space Systems Lab. Research in Space Systems emphasizes space robotics, human factors, applications of artificial intelligence and the underlying fundamentals of space simulation. There are currently many systems being tested, including Ranger, a four-armed satellite repair robot, and EUCLID, a 6 degree of freedom free-flying underwater camera platform.”
See other early Space Teleoperators here.
See other early Lunar and Space Robots here.