The 1982-4 – Telepresence Servicer Unit (TSU) Concept.
Free-Flying Teleoperator
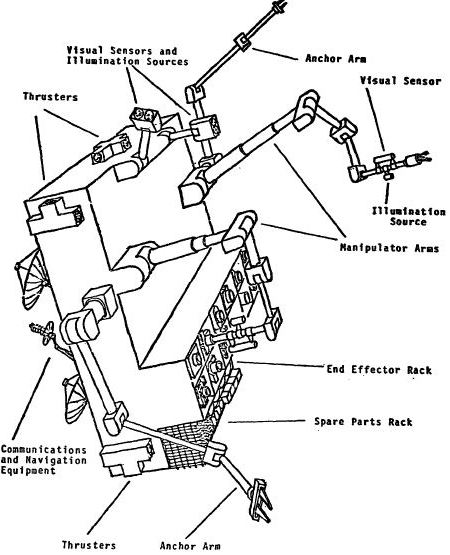
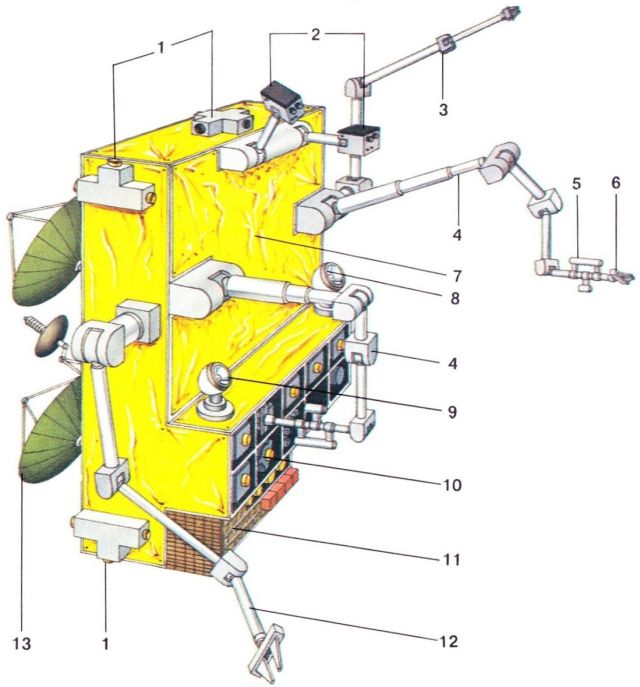
1. Thrusters
2. Vision sensors
3. Anchor arm
4. Manipulator arm
5. Vision sensor
6. Gripper
7. Thermal insulation
8. Light
9. Light
10. End effector rack
11. Spare part rack
12. Anchor arm
13. Communications and navigation antennas.
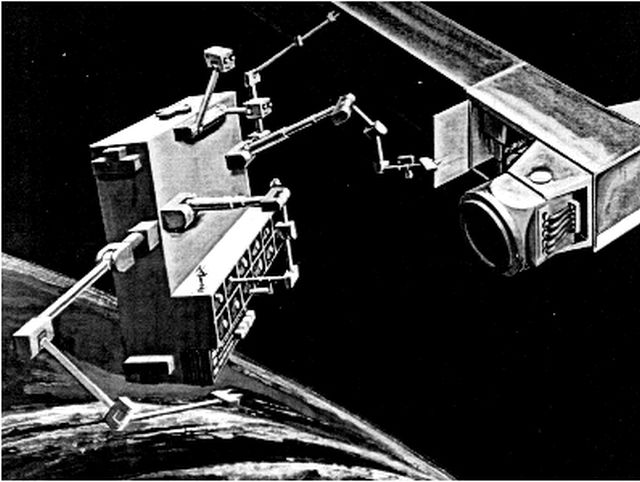
As awarded under the Space Applications of Automation, Robotics and Machine Intelligence Systems (ARAMIS) -Telepresence program on June 10,1982 by NASA/MSFC, this craft was designed by researchers Akin and Minsky at the Massachusetts Institute of Technology in association with NASA. It is called the Telepresence Servicer Unit (TSU) and is intended as a remote servicer which would be compatible with several spacecraft, and capable of performing maintenance to the same level as a man could in space. It would employ the concept of telepresence by which a human operator on Earth could direct the robot craft in space as if he were really there. Two arms would grapple the ailing satellite, two others perform repairs.
For further detail, see pdfs here and here.
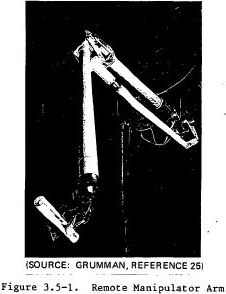
This Grumman remote manipulator arm could be used on the Telepresence Servicer Unit.
The final ARAMIS report included other concepts:
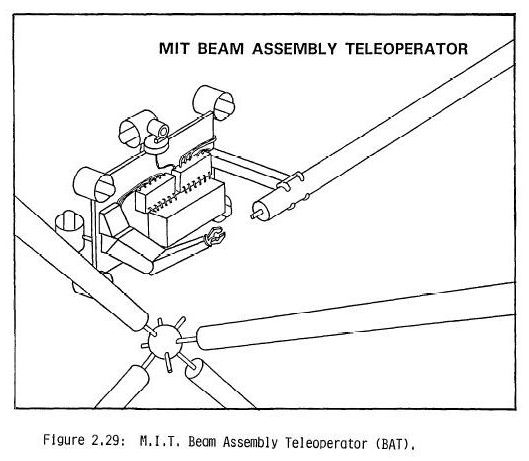
M.I.T. Beam Assembly Teleoperator (BAT)
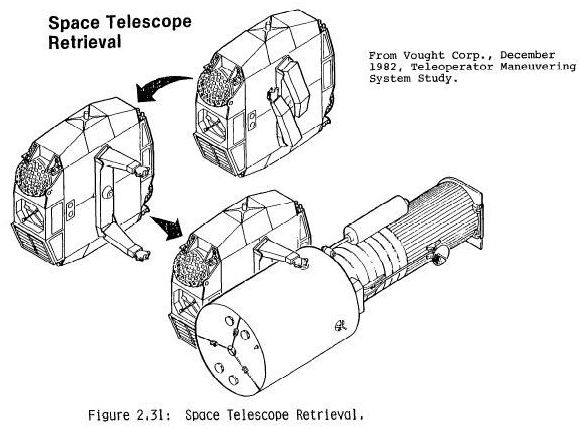
Space Telescope Retrieval concept by Vought.
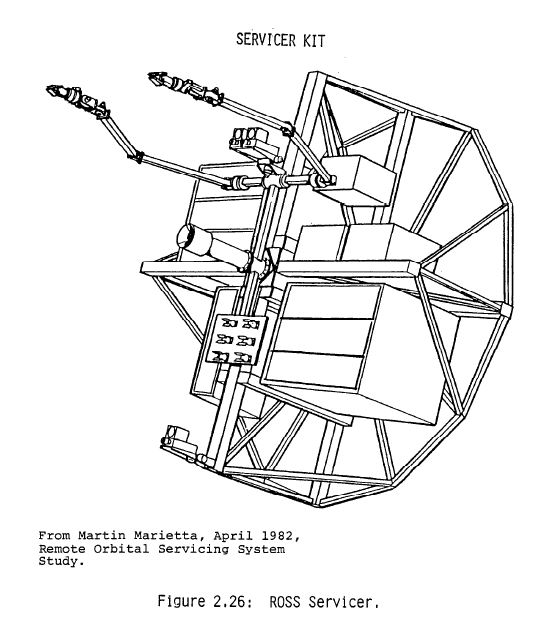
ROSS Servicer by Martin Marietta.
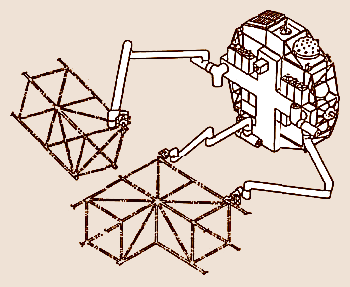
Early ARAMIS conceptual design.
See other early Space Teleoperators here.
See other early Lunar and Space Robots here.